


Соломон Геллерштейн
Методология психотехники. Предвосхищение. Эволюция. Труд. Избранные психологические труды. Том 2
Вот почему наши усилия должны быть направлены в первую очередь на восстановление двигательных функций, особенно функций руки. Здесь-то и выступает на сцену самая существенная форма восстановительной трудовой терапии.
Каковы специфические ее особенности?
Характерной особенностью этой формы трудовой терапии является ее направленность на восстановление совершенно определенных функций, выпавших или ослабленных вследствие той или иной локализации ранения. Мы вправе поэтому назвать эту форму трудовой терапии локально-восстановительной формой. Поскольку речь идет в основном о восстановлении двигательных функций, можно рассматривать эту трудовую терапию как вид двигательной терапии (иногда обозначаемой термином «мототерапия» или «кинезотерапия»). Локально-восстановительный характер трудовой двигательной терапии нисколько не снимает и не снижает ее общелечебного и общевосстановительного значения.
Другой характерной особенностью описываемой формы трудовой терапии является дифференцированный подбор трудовых заданий сообразно дифференциации двигательных нарушений, столь же многообразных, сколь многообразны ранения конечностей, – по тяжести, по выпадениям или ограничениям функций, по вторично возникающим патологическим симптомам, по последствиям.
В практике госпитальной работы эта форма трудовой терапии до сих пор не нашла еще достаточно широкого и заслуженного применения, несмотря на принципиальное признание ее огромного значения в деле восстановления боеспособности и трудоспособности. Едва ли нужно приводить особые аргументы в доказательство актуальности и ценности этого метода. Достаточно заинтересоваться статистикой и попытаться отдать себе отчет в преобладающем характере и типе ранений в нынешнюю Отечественную войну, чтобы ясно стало, насколько необходимо перенести сейчас центр тяжести на организацию и внедрение в систему госпитальных мероприятий всех терапевтических средств, обладающих наиболее выраженными локально-восстановительными тенденциями.
Восстановительная трудовая терапия, прекрасно сочетающая в себе общетонизирующее воздействие на организм в целом со специфическим воздействием на двигательную сферу, является одним из таких мощных терапевтических средств. Широкое внедрение ее в работу наших госпиталей продиктовано самыми насущными потребностями военного и, как это станет понятным из дальнейшего, послевоенного периода.
Эту форму трудовой терапии мы будем в дальнейшем называть дифференциально-восстановительной формой, так как содержание подбираемых для каждого раненого трудовых заданий дифференцируется в зависимости от характера дефекта, от функций, подлежащих восстановлению.
Основным средством для восстановления двигательных функций в системе дифференциально-восстановительной трудовой терапии являются, как мы увидим, трудовые движения в их естественной форме и в тех сочетаниях, какие присущи целенаправленной и осмысленной трудовой деятельности человека. В этом смысле трудовые движения являются высшей формой двигательных проявлений вообще.
Но вместе с тем эти сложные по своей природе движения не свободны от воздействия на них более простых и более древних механизмов, управляющих двигательным аппаратом. Трудовые движения, как и всякие движения, подчиняются определенным анатомическим и физиологическим законам, от которых зависит своеобразие наших двигательных проявлений, мера доступных нам двигательных возможностей, а также границы расширения этих возможностей под влиянием факторов развития и упражнения. В силу сложной природы трудовых движений умелое их использование в качестве восстановительного средства предполагает знание своеобразия специфических особенностей трудовых движений как высшей формы движений, а также общих свойств трудовых движений, роднящих их с любыми более простыми движениями.
В своем филогенетическом развитии двигательный аппарат человека претерпел ряд изменений. Сложившаяся конструкция двигательного аппарата состоит из отделов, имеющих неодинаковый филогенетический возраст. В процессе развития изменились иерархические соотношения между отдельными звеньями сложного аппарата по управлению движениями. Возросла роль высших инстанций центральной нервной системы. Произошла перестройка связей между управляющими и подчиненными инстанциями. И в то же время исполнительная часть двигательного аппарата – при всех изменениях, которые она претерпела с того времени, как человек приобрел выпрямленную походку, стал пользоваться орудиями труда, с их помощью изготовлять средства производства и научился производительнее добывать и перерабатывать предметы потребления, – сохранила в наибольшей степени свои изначальные анатомо-физиологические особенности, свою биологическую природу.
Квалифицированная методическая работа в области восстановительной трудовой терапии требует прежде всего знания этих общих анатомо-физиологических основ движений. Сюда входит не только анатомическое устройство двигательного аппарата человека и не только нервно-мышечная физиология, как она представлена в учебниках физиологии, но и биомеханика живого движения, и психофизиология трудовых движений и трудовой деятельности в целом. Кроме того, учение о движениях человека, составляющее теоретический фундамент восстановительной трудовой терапии, должно включать в себя специальную главу, посвященную патологии движений. В ней должны быть описаны наиболее типичные формы двигательных расстройств, возникающие на почве травм военного времени. Все разделы науки о движениях должны быть изложены в разрезе функциональном. Только при этом условии возможно перекинуть мост от теоретических представлений о природе двигательных функций к практике их восстановления.
В настоящей книге нет возможности, да и едва ли это уместно, представить даже в самых общих чертах основные сведения о движениях человека. Мы считаем, однако, необходимым изложить в следующей главе некоторые самые существенные факты, имеющие непосредственное отношение к нашей теме. Эта глава должна рассматриваться как пропедевтика к дальнейшему изложению. Необходимо помнить, что в этой пропедевтической части есть существенный пробел, обусловленный отсутствием сколько-нибудь систематизированных и обобщенных научных данных о механизмах восстановления движений. Этот самый актуальный для нас вопрос мы принуждены поэтому осветить крайне скупо.
§ 6. Как построен и как работает двигательный аппарат человека[7]
а) Биомеханические основы движений
Наука о восстановлении движений нуждается, прежде всего, в подкреплении со стороны тех глав общего учения о движениях, в которых трактуются вопросы о подвижности отдельных звеньев двигательного аппарата, о доступных отдельным суставам степенях свободы и о факторах, от которых зависит неодинаковая подвижность в отдельных сочленениях.
Трудовая деятельность человека на каждом шагу демонстрирует нам яркие примеры богатства и разнообразия двигательных возможностей человека. Достаточно вспомнить, какой тонкости, координации и быстроты достигают движения у музыкантов, а также в квалифицированных профессиях ручного труда – особенно в современных «пальцевых профессиях» (машинопись, профессии связи, полиграфические профессии и т. д.), чтобы убедиться в справедливости этого положения. Еще более поразительный пример исключительной ловкости, более того – виртуозности движений – мы наблюдаем в игровой деятельности человека, в ряде областей искусства и спорта. Наибольшего совершенства в этом смысле достигла человеческая рука, умеющая с предельной искусностью одновременно выполнять как сильные размашистые движения, так и мельчайшие высококоординированные движения.
Как в трудовой деятельности; так и в искусстве и в спорте эта высокая степень совершенства движения руки является результатом длительного и систематического упражнения. Однако само по себе упражнение способно усовершенствовать двигательный аппарат и развить изумительную дифференцированность движений только благодаря наличию определенных анатомо-физиологических и биомеханических предпосылок, составляющих потенциальную основу наших двигательных возможностей. Уже в самой конструкции двигательного аппарата, в устройстве его костных элементов, в форме и размерах соответствующих суставов, в строении мышц, связок и т. п., заложены в значительной степени основы доступных нам движений, их объем, сила и пластические свойства. У многих эти свойства до конца жизни так и остаются в латентном состоянии, не раскрытыми, не выявленными. О двигательных возможностях человека надо судить по вершинным достижениям, а не по фактическому уровню.
Что представляет собой конструктивная основа нашего двигательного аппарата? Прежде всего, надо подчеркнуть, что это не жесткая, неизменная конструкция, а живая, динамическая. Даже костная основа, казалось бы, стабильная и неизменная, и та претерпевает определенные изменения как в процессе исторического развития, так и в онтогенезе, под влиянием профессии, специальной тренировки и т. д. Чисто механические свойства кости, ее сопротивляемость на сжатие, растяжение и т. п. изменяются под воздействием длительных нагрузок с преобладанием в одних случаях сдавливания, в других – растяжения. При всем этом все же наименее изменчивой конструктивной частью является костная основа. Способ соединения отдельных костных звеньев в основном предопределяет характер и степень их подвижности. Наибольшей степени подвижности достигают суставы, обладающие шаровидной поверхностью – выпуклой в одном звене, вогнутой в другом. Но движения, в частности трудовые, обладают не только широкими границами подвижности, но и большим диапазоном силовых проявлений, зависящих от требований различных профессий. Сила движений в ряде случаев бывает столь велика, что костным рычагам угрожала бы опасность оторваться друг от друга, если бы для избегания этой опасности не пускались в ход противодействующие силы: мышцы, прижимающие друг к другу сочленовные поверхности и связки (не говоря уж о непроницаемости сочленовной сумки, обеспечивающей прочность соединений рычагов).
Восстанавливая движения, необходимо знать, от каких факторов зависит в основном количество доступных каждому суставу степеней свободы, чем определяется форма того или другого движения и границы его подвижности. Решающим фактором является форма соприкасающихся поверхностей. Мы уже указывали на то, что шаровая поверхность, скользящая в шаровой впадине и позволяющая звену совершать движения вокруг трех взаимно-перпендикулярных осей, обладает наибольшей подвижностью, т. е. обеспечивает три степени свободы. Между количеством степеней свободы и размахом движений нет связи. Если бы головка плеча, скользя по впадине лопатки, встретила на своем пути то или иное препятствие или если бы существовало иное соотношение между размером соприкасающихся поверхностей, то размах движений был бы иным. Следовательно, размер подвижности того или иного рычага определяется в основном наличием или отсутствием препятствий к свободному движению в суставе. Такими препятствиями являются бугорки, закраины, не говоря уже о мышцах и связках.
Рассмотрим с этой точки зрения в самом общем виде основные суставы верхней конечности, поскольку центр тяжести восстановительной трудовой терапии переносится на борьбу с нарушениями функций верхней конечности.
Редкие суставы сочленяются по шаровидному способу. Чаще встречаются суставы, дающие возможность рычагам совершать движения вокруг двух или одной осей. В частности, седловидный способ соприкосновения поверхностей принадлежит к числу нередких способов, обеспечивающих две степени свободы. Рычаги ведут себя в этих суставах так, как всадник на английском седле: благодаря выпуклости седла в поперечном разрезе и вогнутости в продольном всадник имеет возможность наклоняться вперед и назад и в обе стороны. Вокруг вертикальной оси движение оказывается невозможным. Примером такого сустава является запястно-пястный сустав большого пальца.
Форма сустава лишь теоретически определяет мыслимую степень его подвижности. Реально далеко не всегда мышечный аппарат способен осуществить теоретически доступные суставу движения. Это относится, в частности, к пястно-фаланговым суставам, имеющим шаровидную форму. Теоретически они должны были бы обладать тремя степенями свободы. В действительности они могут совершать движения только вокруг поперечной оси (сгибание – разгибание пальцев) и передне-задней оси (приведение – отведение пальцев). Активные движения вокруг вертикальной оси оказываются невозможными, вследствие отсутствия соответствующих мышц.
Возможны и обратные случаи, когда степень подвижности сустава под влиянием определенных факторов отклоняется от теоретически предполагаемой не в сторону уменьшения, а в сторону увеличения подвижности. Такое увеличение достигается обычно за счет гибкости хряща.
Так, лучезапястный сустав имеет две степени свободы: ему доступны движения сгибания – разгибания и отведения – приведения. Однако благодаря податливости хрящей можно добиться пассивного вращения кисти вокруг продольной оси, правда, весьма ограниченного.
Верхняя конечность обладает также одноосными суставами. К ним принадлежат, например, межфаланговые и плечелоктевой суставы. Наконец, мы встречаем на руке плоские суставы. Они дают возможность одной поверхности скользить вдоль другой. Движения эти обычно бывают ограниченны вследствие прочности охватывающих эти суставы связок.
Каким максимальным количеством степеней свободы обладают наши суставы? Теоретически можно мыслить в одном подвижном теле 6 степеней свободы, образующихся из вращения вокруг трех осей и соответствующих поступательных движений вдоль этих осей. Шестью степенями свободы в действительности обладает только не закрепленное ни в одной точке тело. Достаточно закрепить в одной точке тело, и оно сразу лишается трех степеней свободы. Закрепив тело в двух точках, мы оставляем ему только одну степень свободы. Закрепив тело в трех точках, мы лишаем его и этой единственной степени свободы. Все подвижные звенья нашего скелета представляют собой рычаги, закрепляющиеся в одной и больше точек. Поэтому максимальное количество степеней свободы одного звена по отношению к другому, рассматриваемому как неподвижное, не превышает трех (например, плечевой сустав).
Форма человеческой руки с цепью последовательно сочленяющихся звеньев, число которых увеличивается по мере перехода от проксимальных отделов к дистальным, обеспечивает в силу биомеханической конструкции руки очень большое количество степеней свободы для кисти, так как кисть способна перемещаться в любую точку так называемого рабочего пространства, используя свою связь с предплечьем, связь предплечья с плечом, плеча с лопаткой и т. д. Благодаря такому устройству, кисть, которая при неподвижном предплечье, плече и т. д. имеет только две степени свободы в лучезапястном суставе, оказывается в состоянии совершать очень сложные и разнообразные переместительные движения. При этом одно и то же положение в пространстве кисть и ее элементы могут занять с помощью самых различных движений. Это обстоятельство имеет для нас особенное значение, так как в необходимых случаях, в частности при наличии тех или иных двигательных дефектов, один вариант движения может быть заменен другим. В процессе трудовой восстановительной терапии приходится весьма часто пользоваться этой возможностью.
С точки зрения восстановительных задач вопрос о границах подвижности имеет не меньшее значение, нежели вопрос о степенях свободы.
Попробуем на одном каком-нибудь примере показать, от чего зависит и как определяется граница подвижности. Рассмотрим для этого плечевой сустав. Плечо соединяется с лопаткой посредством шаровидного сочленения: выпуклая шаровая поверхность головки плеча входит в вогнутую шаровую поверхность сочленовной площадки лопатки. Радиус шаровой поверхности плеча заметно больше соответствующего радиуса лопатки. Размеры соприкасающихся площадей стоят друг к другу в отношении 3 к 1. Это обстоятельство само по себе обеспечивает большую подвижность плечевой кости. Измерение показывает, что поверхность лопатки в поперечном направлении охватывает 45° дуги, в то время как головка плеча в том же направлении занимает 135°. Если из определенного исходного положения поворачивать головку плеча вокруг вертикальной оси, сохраняя неподвижную лопатку, то размер движения определится разностью между 135° и 45°, т. е. составит 90°, при условии, конечно, что со стороны мышечного и связочного аппарата не будет помех для описанного движения. Таким же способом устанавливается граница подвижности при вращении плеча вокруг горизонтальной оси. Размеры соответствующих дуг в этом направлении составляют 140° для плеча и 70° для лопатки. Следовательно, граница подвижности, равная разности этих двух величин, составляет 70°.
Если аналогичным образом попытаться определить границы подвижности локтевого сустава, то без большого труда удастся установить, что они составляют 140°. Эта величина является разностью двух величин. Одна из них выражает в градусах размер свободной окружности блока, которым заканчивается дистальная часть плеча (320°); другая характеризует степень охвата этого блока полулунной вырезкой проксимального конца локтевой кости. Сгибание и разгибание локтя сопровождается опоясыванием блока плечевой кости вырезкой локтевой кости. Размер этого опоясывания равняется 320°–180°, что и составляет 140° при условии, если описанному движению не мешает натяжение связок и т. п.
Несколько своеобразно построено плечелучевое сочленение. Будучи по форме шаровым (головчатое возвышение дистальной части плеча входит в соответствующую ямку головки луча), это сочленение, казалось бы, так же как и лопаточно-плечевое, должно обеспечить лучевой кости три степени свободы. В действительности этого нет. Причиной такого ограничения является полужесткая связь лучевой кости с локтевой. В силу этого лучевая кость способна совершать движения сгибания и разгибания, а также – уже за счет локте-лучевого сочленения – движения пронации и супинации.
Касаясь лучезапястного сустава, нужно отметить, что при двух степенях свободы, обеспечиваемой яйцевидной формой сустава, он имеет довольно широкие границы подвижности, так как выпуклая поверхность костей запястья (ладьевидной, лунной и трехгранной) заметно преобладает над вогнутой поверхностью луча. Как известно, две степени свободы в этом суставе выражаются в движениях сгибания – разгибания и приведения – отведения. Некоторые говорят еще о пронации – супинации кисти, рассматривая лучевую кость как продолжение кисти.
Пястные кости вообще, исключая пястные кости большого пальца, малоподвижны. Лишь путем специальных упражнений – за счет растяжения связок между дистальными их головками – можно увеличить эту подвижность. Для трудовых движений огромную роль играет подвижность пястной кости большого пальца. Седловидная форма сустава обеспечивает ему две степени свободы. На долю большого пальца выпадает исключительно ответственная роль во всех ручных и инструментальных работах. Ему приходится довольно широко пользоваться предоставленными ему двумя степенями свободы и доступными ему границами подвижности. Едва ли рука человека в состоянии была бы выполнить десятую долю своих рабочих функций, если бы ей не помогал в этом большой палец. Этот маленький факт немножко большей подвижности одной из косточек кисти имел решающее значение для судеб всего человечества. Можно смело сказать, что благодаря этому устройству большого пальца, обусловливающему громадные разнообразия хватательных движений, человек впервые научился обращаться с орудиями и инструментами. Наряду с выпрямленной походкой, может быть, ни один биомеханический факт не имел для человека такого решающего культурно-исторического значения» (Н. А. Бернштейн).
Хотя пястно-фаланговые суставы в силу шаровидной своей формы трехосны, но фактически они обеспечивают пальцам только две степени свободы движений вместо ожидаемых трех. Поворот пальцев около продольных осей невозможен, так как не существует необходимых мышц для активных движений в этом направлений. В очень ограниченных пределах здесь осуществимы лишь пассивные движения.
Значительное преобладание углов сгибания пальцев над углами их разгибания объясняется помимо прочего тем, что шаровые поверхности пястных костей в дистальной их части заходят далеко на ладонную сторону.
Что касается межфаланговых суставов, то все они одноосны, в силу чего фаланги совершают только движения сгибания и разгибания.
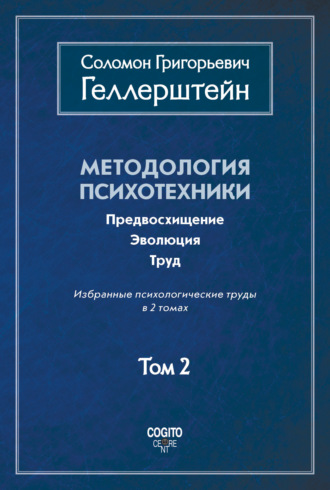
Для того чтобы представить все изложенное в наглядном схематическом виде, мы приводим в виде иллюстрации к сказанному таблицу, в которой перечислены все суставы верхней конечности и указана по отношению к каждому суставу его форма, количество доступных ему степеней свободы, характер производимых им движений и количественное выражение границ их подвижности. В биомеханике принято изображать границы подвижности с помощью построения так называемых глобусов подвижности, дающих совершенно наглядное представление о подвижности отдельных суставов и о всех размерах любых движений. Мы ограничимся здесь только соответствующей таблицей (см. таблицу 1).
б) Содружественная работа мышц
До сих пор мы рассматривали конструктивные особенности одного только костного аппарата верхней конечности. Для понимания строения и работы двигательного аппарата в целом необходимо представить себе ясно работу мышц. Важно с самого начала подчеркнуть, что строение связочно-мышечного аппарата находится в определенной связи со строением костного аппарата. Назначение движения, осуществляемого костными рычагами, так же как и границы подвижности этих рычагов и количество доступных им степеней свободы, в основном определяют потребные для производства движений мышечные тяги. Поэтому ни количество вводимых в действие мышц, ни их расположение, ни способ их прикрепления к костям не являются случайными образованиями. Все это подчинено определенным закономерностям, вытекающим из истории развития организма и из характера выполняемых им функций.
Первый вопрос, возникающий при рассмотрении работы двигательного аппарата, заключается в следующем: сколькими и как расположенными по отношению к суставу мышцами осуществляется то или иное движение? Мы знаем, что все мыслимые движения верхней конечности, включая сюда и функционально связанные с ними движения плечевого пояса, сводятся в конечном счете к совершенно определенным движениям сгибания, разгибания, приведения, отведения, вращения и к комбинациям этих движений. Если перебрать все это многообразие движений и вычленить основные, относя их к системе пространственных координат, то их окажется в основном для верхней конечности, включая и плечевой пояс, – 60 (см. таблицу 2). Нетрудно понять, какое бесчисленное множество комбинированных движений можно образовать из этих 60 элементов.
С другой стороны, если пересчитать все мышцы, на долю которых выпадает осуществление движений верхней конечности, то их окажется 51. Мы знаем, что для производства одного движения часто мобилизуются несколько мышц. В то же время одна и та же мышца нередко участвует в нескольких движениях.
Если принять во внимание многообразие форм самих мышц и крайне неоднозначный способ их прикреплений к костным рычагам, то на первый взгляд может показаться, что человеческие движения требуют для своего осуществления весьма сложного конструктивного построения.
Таблица 1. Соотношения между формой суставов верхней конечности и соответствующими движениями

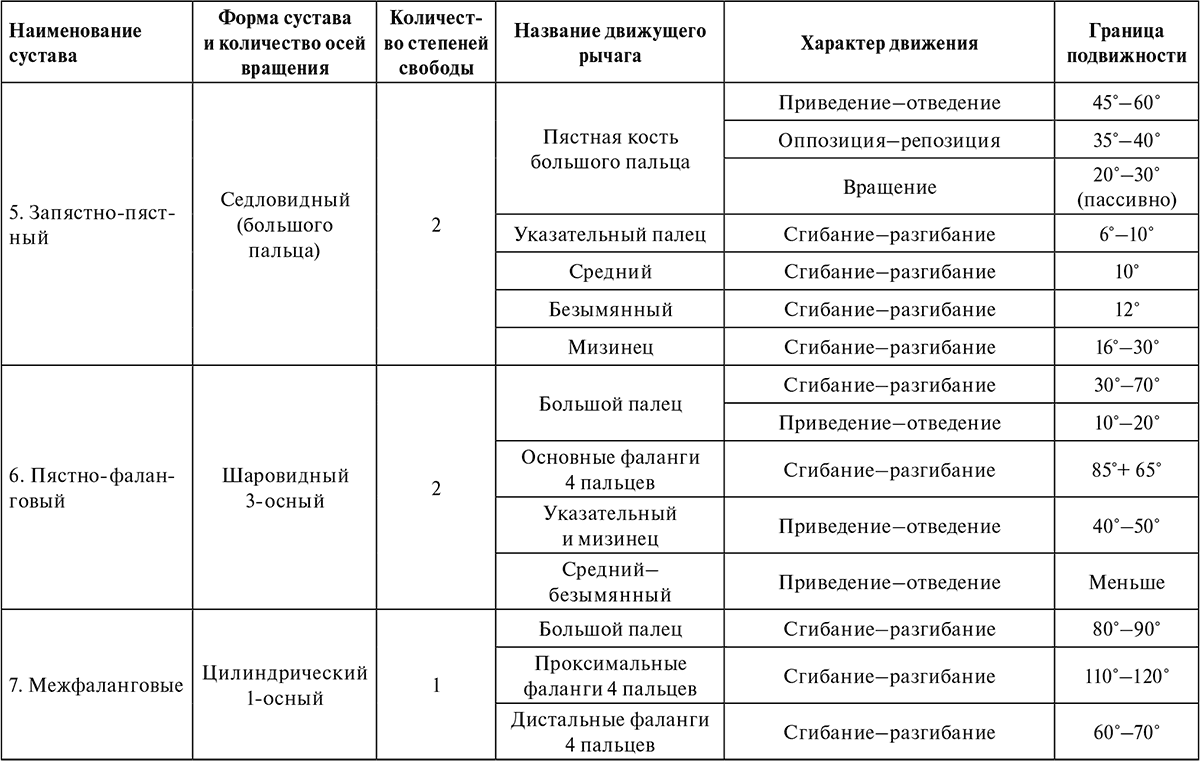
Таблица 2. Основные движения верхней конечности
Однако такое предположение лишь отчасти справедливо. Нужно вспомнить, что сами по себе движения – особенно движения руки – высокодифференцированны, послушны любому импульсу и способны менять, когда в этом есть необходимость, свой размах, силу, амплитуду, темп и т. д. Для такой слаженности работы двигательного аппарата нужна не только тонкая регуляция двигательных импульсов, но и приспособленность самого двигательного аппарата к тому, чтобы умело подчинить себя меняющимся «приказам» и хорошо справляться с разнообразием возлагаемых на него задач. Мышцы – эти специализированные исполнители определенных приказаний – должны уметь выполнять свою роль в сложном и дружном ансамбле, в одних случаях друг друга поддерживать, в других – притормаживать, в третьих – действовать в прямо противоположном направлении.
Представление о роли мышц в осуществлении движений будет неполным, если не принять во внимание сложных функциональных отношений между многочисленными звеньями двигательного аппарата в процессе выполнения трудового акта. Речь идет в данном случае даже не только о непрерывном перераспределении тонуса и переходе напряжения с одной группы мышц на другую, не только о постепенно меняющихся взаимоотношениях агонистов, антагонистов и синергистов, не только об одновременном напряжении противоположных мышц для закрепления суставов. Речь идет об участии в любом, даже очень ограниченном движении, таких мышц, которые, казалось бы, совершенно не заинтересованы в данном движении. Такое косвенное участие «посторонних» мышц в реализации движения обусловлено тем, что мышцы являются не только двигателями, но и фиксаторами. Так, работу кисти, особенно при оперировании тяжестями, невозможно осуществить без участия мышц предплечья и плеча. Проксимальные отделы руки обязательно должны производить уравновешивающую мышечную работу, когда дистальные отделы берут на себя те или иные двигательные функции. В противном случае рука как рабочий орган постоянно выводилась бы из устойчивого состояния всякий раз, когда кисть и пальцы производили бы ту или иную работу.
Мышцы проксимальных отделов могут работать самостоятельно, они не зависят от работы мышц дистальных отделов. Наоборот, работа кисти почти невозможна без работы плеча и предплечья.
Как в хорошо слаженном оркестре количество инструментов и их сочетание не является случайным, так и в стройно работающем двигательном аппарате выбор исполнителей имеет свою внутреннюю логику. В частности, это касается принципа действия мышечных тяг. Анализ работы, возлагаемой на мышцы при данном устройстве костных рычагов и суставов, показывает, что для производства только одного какого-нибудь движения в любом суставе, например для сгибания в локтевом суставе, необходимо иметь две тяги противоположного действия. Такие тяги принято называть антагонистами по отношению друг к другу. В дальнейшем мы увидим, что это название, наталкивающее на ассоциацию о «враждебных» взаимоотношениях отдельных мышц, не совсем точно отражает истинный характер их отношений, ибо противоположно направленные действия являются лишь очень своеобразной формой совместной работы и взаимопомощи[8].
Если для одноосного сустава вполне достаточно двух мышц, работающих одновременно, то нельзя сказать, что количество потребных мышц для двухосных или трехосных суставов будет возрастать в прямой пропорции к количеству осей. Для двухосного сустава в принципе требуются не две пары мышц, а только три мышцы. Комбинируя действие трех тяг, мы легко можем вызвать движения вокруг любой из двух осей.
Точно так же для трехосного сустава нужны не три пары мышц, а всего только четыре мышцы. В этом также легко убедиться, если представить себе механическую конструкцию, в которой рычаг способен совершать движения вокруг трех взаимно перпендикулярных осей. Комбинируя действия четырех тяг, мы можем добиться вращения около любой из трех осей.
Если мы имеем одноосный сустав между двумя мышцами, заставляющими его перемещаться в прямо противоположных направлениях, существует своего рода постоянство отношения: одна мышца является антагонистом по отношению к другой. Для двухосного сустава и тем более для трехосного такого постоянства отношений уже не существует. Когда возникает необходимость, любая пара мышц может вступать в содружественную однонаправленную работу, противопоставляя себя другим мышцам. Мышцы, бывшие только что синергистами, могут стать антагонистами. Например, для сгибания кисти в лучезапястном суставе одновременно сокращаются лучевой сгибатель запястья и локтевой сгибатель запястья (flexor carpi radialis, flexor carpi ulnaris).
В то же время растягиваются локтевой разгибатель запястья (extensor carpi ulnaris) и два лучевых разгибателя запястья – короткий и длинный (extensor carpi radialis brevis et longus). При разгибании кисти те же мышцы действуют с переменой ролей: те, которые прежде сокращались, теперь растягиваются. Таким образом, для актов сгибания и разгибания кисти установилось определенное взаимоотношение антагонистического характера между мышцами сгибателями и разгибателями.
Эти взаимоотношения нарушатся, когда тому же самому ансамблю мышц придется осуществлять акты приведения и отведения кисти. Оказывается, что дружба сгибателей в их «борьбе» против разгибателей тотчас же нарушится. Роли переменятся, мышцы из одного лагеря перейдут в другой и вступят друг с другом в иные «договорные» отношения. Так, например, приведение кисти потребует одновременного сокращения локтевого сгибателя и локтевого разгибателя запястья, а растянутыми должны будут оказаться лучевой сгибатель и два лучевых разгибателя. Противопоставленными друг другу будут при этом луч и локоть, а не сгибатели и разгибатели. Отведение создаст аналогичные взаимоотношения, но с переменой ролей сокращающихся и растягивающихся мышц. Еще более интересными станут отношения между упомянутыми мышцами, когда лучевая кость вместе с кистью станут осуществлять пронацию и супинацию. При пронации содружественно сокращаться должны лучевой сгибатель и локтевой разгибатель запястья, а растягиваться будут локтевой сгибатель и лучевые разгибатели запястья. При супинации эти группы должны будут поменяться ролями без перемещений внутри каждой группы.
Чрезвычайно поучителен тот факт, что для выполнения некоторых движений приходится прибегать к сокращению мышц, выполняющих, на первый взгляд, совершенно противоположные по направлению движения. Так, например, для осуществления очень тонкого сгибания пальцев, казалось бы, необходимо привести в действие соответствующие мышцы-сгибатели. Однако анализ показывает, что очень тонкие, ограниченные в своей силе и амплитуде трудовые движения, например, движения при игре на музыкальных инструментах, осуществляются совершенно не этим, казалось бы, единственным возможным способом. Для производства таких движений достаточно бывает использовать разницу в тонусе сгибателей и разгибателей пальцев. Напомним, что при обычной позе кисти у всех людей пальцы находятся в полусогнутом состоянии. Чтобы использовать это преобладание тонуса сгибателей над разгибателями, достаточно совершить акт разгибания пальцев, после чего пальцы сами возвратятся в свое обычное спокойное состояние, совершив при этом требуемое сгибательное движение. По этому принципу обычно работает наша кисть во время письма. Эту особенность используют в фортепианной педагогике для тренировки беглости пальцев.
