Александр Широкорад
Дроны. Оружие XXl века
Глава 4
Германские линкоры-мишени
Согласно Версальскому договору Германии было разрешено сохранить 8 линкоров додредноутного типа, причём два из них должны были находиться в резерве.
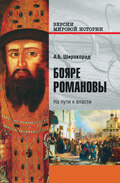
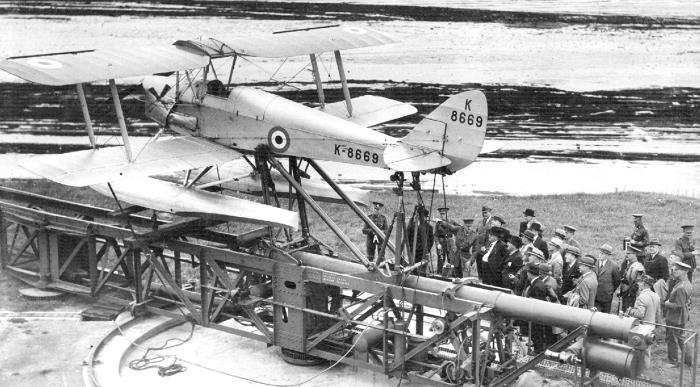
Броненосец «Церинген» (водоизмещение 12 тыс. тонн, вооружение: 4 – 280‑мм орудия), введённый в строй в 1902 г., 11 марта 1920 г. был выведен из боевого состава флота и превращён в блокшив. С 1926 по 1928 г. на верфи в Вильгельмсфагене его переоборудовали в радиоуправляемую мишень.
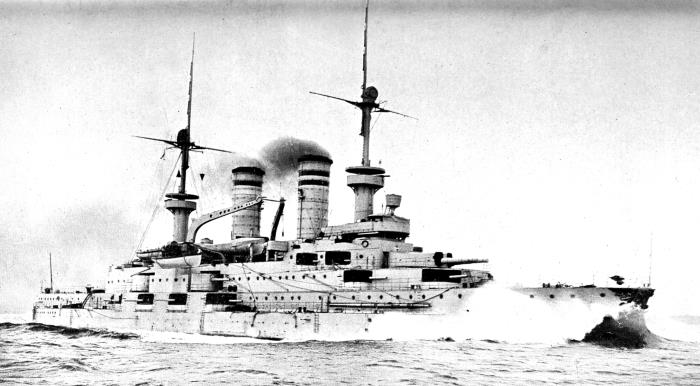
Броненосец «Церинген» до переделки в корабль-мишень
На корабле был произведен капитальный ремонт главной энергетической установки. Трёхвальную конструкцию заменили парой трёхцилиндровых двигателей тройного расширения с вертикальным расположением цилиндров. Подача пара обеспечивалась двумя водотрубными котлами, работающими на жидком топливе. Система была разработана для дистанционного управления через беспроводной телеграф. При этом приёмник располагался глубоко внутри корабля за тяжёлой броневой защитой, чтобы он не был повреждён огнем. Новая силовая установка обеспечивала максимальную скорость 13,5 узлов.
Надстройка была убрана, а корпус подвергся серьёзной модификации. Водонепроницаемые отсеки были значительно увеличены, отверстия в корпусе заделаны, и судно заполнили примерно 1700 тоннами пробки.
После переделки водоизмещение «Церигена» достигло 11 800 т. Экипаж мишени составлял 67 человек. Кораблём управления стал миноносец «Блитц».
«Цериген» первый раз использовался в качестве мишени 8 августа 1928 г. на церемонии, проводившейся в честь президента Пауля фон Гинденбурга. Во время учений старый линкор «Эльзас» обстрелял «Церинген». В течение следующих 16 лет он служил кораблём-целью для рейхсмарине, а затем кригсмарине, вместе со старым линкором «Гессен». В ходе стрельб выяснилось, что добавление пробки, предназначенной для удержания корабля на плаву в случае серьёзного повреждения корпуса, привело к загораниям. Модификация двигательной установки корабля также оказалась ошибкой, так как скорость корабля была слишком низкой, что затрудняло его маневренность.
«Церинген» продолжал служить до Второй мировой войны, первоначально базировавшись в Вильгельмсхафене. «Церинген», «Гессен» и их катера управления были переданы в Инспекцию морской артиллерии 1 августа 1942 г. 18 декабря 1944 г. старый корабль был тяжело повреждён бомбами во время воздушного налёта на Готенхафен и затонул на мелководье. Затем «Церинген» сняли с мели и отбуксировали к входу в гавань, где 26 марта 1945 г. его затопили, чтобы заблокировать порт.
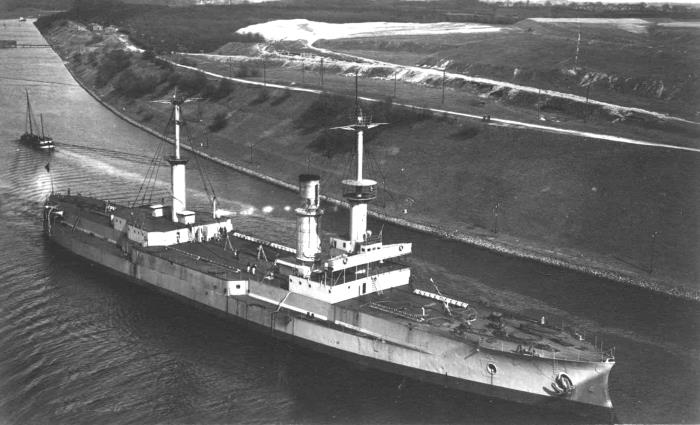
«Церинген», переделанный в кораб
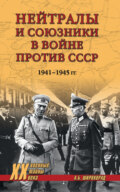
В 1934 г. было решено переделать в радиоуправляемую мишень броненосец «Гессен» (14 400 т; 4 – 280‑мм пушки; 18,7 уз.), введённый в строй в 1905 г.
«Гессен» был выведен из резерва в 1935 г. и поставлен на модернизацию на верфи в Вильгельмсхафене. Если корпус «Церингена» не был существенно перестроен, то «Гессен» после модернизации трудно было узнать. С корабля демонтировали всё вооружение, кроме барбетов 28‑см пушек, все мачты и надстройки.
Корпус удлинили на 10 метров установкой новой носовой оконечности. Машинную и котельную установку демонтировали полностью: новые котлы обеспечивали паром две турбины, вращавшие боковые винты корабля-цели (центральный, как и на «Церингене», сняли). Скорость хода после модернизации достигла 20 узлов. Все оставшиеся мостики и надстройки, а также новую носовую мачту до главного марса прикрыли противоосколочными экранами.

Броненосец «Гессен» до переделки в корабль-мишень
Согласно данным фирмы «Сименс», система управления могла исполнять до 200 различных команд, в том числе имитировать ответный огонь и ставить дымовую завесу. По более достоверным данным, число команд не превышало 125, а расстояние до корабля управления составляло до 25 км.
5 октября 1945 г. «Гессен» и корабль управления «Блитц» были переданы по репарации СССР. В 1946 г. оба корабля вошли в состав Балтийского флота и были переименованы. «Гессен» стал «Целью», а «Блитц» – «Выстрелом». «Цель» перешёл в Кронштадт. Часть аппаратуры управления поменяли на советские аналоги, но основное оборудование осталось немецким. Пара «Цель» – «Выстрел» стала регулярно участвовать в учениях Балтийского флота, береговой артиллерии и морской авиации.
Поскольку корабль был уже очень старым, то ввели ограничения на калибр боеприпасов, которыми обстреливали корабль-мишень. На «всякий случай» было решено при обстрелах оставлять на борту небольшой экипаж. Команда укрывалась в казематах внутри корабля, но всё равно риск оставался. Денежное содержание экипажа «Цели» было самым высоким на флоте. Экипаж получал оклад, надбавки «за звание» и «за нахождение в море». Кроме этого, морякам дополнительно выдавались так называемые «гробовые» – ещё один оклад, выслуга «год за два» и усиленный водолазный паёк. Несмотря на все льготы, моряки старались списаться с этого корабля.
Экипаж корабля состоял из 102 человек и в процессе учений должен был изменяться следующим образом:
– при стрельбе по кораблю снарядами калибром до 152 мм весь экипаж оставался на борту;
– при применении снарядов калибром до 180 мм часть экипажа с корабля должна была сниматься, оставались лишь две группы: управления и аварийно-спасательная;
– при обстреле снарядами калибром свыше 180 мм всем членам экипажа было положено оставлять борт.
Долгая служба в двух флотах закончилась для «Гессена» – «Цели» в конце 1950‑х гг. Он был разрезан на металлолом в 1960 г. в Риге.
Раздел II
Беспилотники 1930–1945 гг
Глава 1
БПЛА Англии и США 1930–1945 гг
Объём спецвыпуска не позволяет рассказать о десятках радиоуправляемых летательных аппаратах Англии и США, созданных в 1917–1930 гг., и я вынужден ограничиться рассказом о наиболее интересных моделях.
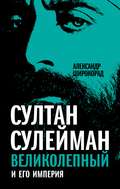
В 1935 г. в Англии на базе биплана «Файри III» был создан БПЛА «Queen Bee» («Пчеломатка»). Он взлетал с катапульты, а приводнялся как гидросамолёт – на поплавки. Первые две модели разбились, а третий образец дрона впервые в истории сумел совершить посадку на воду.
БПЛА «Queen Bee»
Максимальная высота полёта «Queen Bee» – 5 км, максимальная скорость – 170 км/ч. Опытный БПЛА под названием «Tiger Moth» («Тигровый мотылёк») массово производился до 1943 г. в качестве воздушной мишени для Королевского флота. На вооружении он состоял до 1947 г.
Интересно, что термин «дрон» («трутень») в 1936 г. ввёл для обозначения БПЛА капитан 3‑го ранга флота США Делмар Фарни.
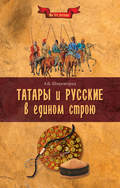
В 1939 г. американский инженер Уолтер Ройтерон сконструировал дешёвую радиоуправляемую мишень OQ‑2. Мишень имела двигатель мощностью 12 л.с., позволявший разгонять её до 137 км/ч. Время полёта составляло около часа. Аппарат имел два соосных деревянных двухлопастных винта. Длина дрона – 2,65 м, размах крыльев – 3,13 м.

Радиоуправляемая мишень OQ-2
Взлёт производился с катапульты. Посадка – в редких случаях на неубирающиеся шасси, но чаще всего с парашютом.
БПЛА OQ‑2 использовался в армии и флоте США. В 1941–1945 гг. завод «Радиоплан» выпустил 15 тысяч дронов OQ‑2. В 1950 г. модифицированный дрон OQ‑3 использовался для прокладки кабелей связи армии США.
26 июня 1945 г. армейский фотограф Дэвид Коновар запечатлел с винтом от OQ‑2 девятнадцатилетнюю сборщицу завода «Радиоплан» Норму Джин Догерти. Фото имело большой успех, и Норма в конце концов превратилась в кинозвезду Мэрилин Монро.

Сборщица Норма Джин Догерти с винтом от OQ-2. Фотография в журнале «Янк»
С 1941 г. Флот США начал активно разрабатывать боевые БПЛА одноразового использования – «авиационные торпеды». В 1942 г. были успешно испытаны модели «Fletcher» BG-1 и BG-2, которые атаковали двигавшиеся со скоростью 7–8 узлов учебные водные цели. Кроме того были произведены успешные тренировочные сбросы торпед и глубинных бомб с помощью телевизионного наведения. В результате флот заказал производство 500 БПЛА и 170 самолётов-носителей.
Чтобы не создавать дополнительную нагрузку на авиационную отрасль, было принято решение конвертировать в БПЛА снятые с вооружения палубные штурмовики-торпедоносцы «Douglas TBD Devastator» (взлётный вес 3,8–4,6 тонны, мотор 900 л.с., максимальная скорость 332 км/ч).
Одновременно с этим по заказу флота США был разработан БПЛА «Interstate» TDR-1, способный нести торпеду или 2000‑фунтовую бомбу. Первой успешной миссией TDR-1 стала атака на японское торговое судно «Yamazuki Maru» 30 июля 1944 г. – на тот момент корабль уже два года сидел на мели на Соломоновых островах, но был вооружён зенитной артиллерией. Всего с 1942 по 1945 г. было произведено 195 таких беспилотников.
С начала 1944 г. ВВС США проводили операцию «Афродита», в рамках которой 25 списанных бомбардировщиков B‑17 были переоборудованы в радиоуправляемые БПЛА и начинены взрывчаткой. С самолётов сняли всё лишнее оборудование (пулемёты, бомбовые подвесы, сиденья), что позволило загрузить в каждый 11–13 тонн взрывчатки – вдвое больше нормальной бомбовой загрузки.
Поскольку радиоуправление не позволяло самолёту безопасно взлететь, взлёт осуществляла команда добровольцев – пилот и бортинженер. После взлёта и набора высоты экипаж приводил в готовность взрыватели, включал систему радиоуправления и выпрыгивал с парашютами. Дальнейшее управление полётом осуществлялось с борта сопровождающего самолёта через радио- и телесвязь.
Самолёт В‑17 со взрывчаткой получил обозначение BQ‑7, а самолёт управления (тоже В‑17) – CQ‑17. Операция «Афродита» проводилась с британских аэродромов.
Первые четыре BQ‑7 взлетели 4 августа 1944 г. Из них три потеряли управление, а один взорвался далеко от цели. Всего до 5 декабря 1944 г. было запущено 24 BQ‑4. Лишь одна «летающая бомба» взорвалась на территории германского завода по производству синтетического горючего, остальные упали не там или были сбиты германской ПВО.

B-17F переделанный в BQ-7
Между тем адмиралы США решили устроить свою «Афродиту», назвав операцию «Наковальней». Для этого они использовали самолёт РВ4У-1 (морская версия В‑24). Облегчив машину на 4 тонны, моряки заложили 9—11 тонн взрывчатки. Управление, как на Б‑17, с помощью телекамер.
В ходе испытаний РВ4У-1 погиб лейтенант Джозе Кеннеди (старший брат Джона Кеннеди). Флот США провёл 6 пусков РВ4У-1, но успеха так и не добился.
В начале 1950‑х гг. ВМФ США использовал шесть БПЛА на базе палубного истребителя F6F‑5K «Хеллкэт» для бомбардировок стратегических объектов в Северной Корее, но проект был свёрнут в связи с низкой эффективностью.
Глава 2
Воздушные дроны Владимира Бекаури
Владимир Иванович Бекаури родился 27 декабря 1882 г. в Тифлисской губернии в семье дворянина-однодворца, то есть крестьянина, имевшего законную или поддельную грамоту о дворянстве. («Липовые» грузинские «дворяне» и «князья» – тема особая.) В 1903 г. Бекаури окончил Михайловское железнодорожное техническое училище в Батуме, то есть, говоря современным языком, профтехучилище. Согласно анкете, участник революции 1905 г. в Грузии. Тем не менее, в 1911 г. Бекаури приезжает в Петербург, где легально поселяется под своей фамилией. В 1911–1920 гг. Бекаури – автор нескольких мелких изобретений, которые, впрочем, особой славы ему не принесли.
Судя по всему, советских партаппаратчиков и лично Ленина Бекаури прельстил своей электрической системой сигнализации для стальных сейфов. А борцы за свободу и гласность, как известно, придя к власти, засекречивают всё, что можно и нельзя. Электрическая сигнализация на сейфах показалась Ленину «архиважной».
9 августа 1921 г. изобретатель В.И. Бекаури получает мандат Совета труда и обороны (СТО), лично подписанный В.И. Лениным. Мандат гласил: «Дан… изобретателю Владимиру Ивановичу Бекаури в том, что ему поручено осуществление в срочном порядке его, Бекаури, изобретения военно-секретного характера». Подпись Ленина производила магическое действие на военных и совслужащих, и Бекаури удалось создать собственный институт – «Особое техническое бюро по военным изобретениям специального назначения», а сокращенно «Остехбюро». (В середине 1930‑х гг. «Остехбюро» иногда сокращали до ОТБ.)
С некоторой натяжкой «Остехбюро» можно назвать секретной империей внутри СССР. Организации Бекаури были переданы около дюжины научных институтов и заводов в Москве и Ленинграде, у него было несколько аэродромов, портов и целая флотилия опытовых судов.
Уже в 1922 г. Бекаури обуяла идея создания нескольких типов телеуправляемого оружия. «Война роботов» пришлась по душе партийному, военному и морскому начальству.
Для создания телеуправляемых самолётов Бекаури потребовался тяжелый самолёт. Поначалу хотели заказать его в Англии, но по неведомым причинам заказ сорвался, и в начале 1924 г. такой заказ был дан ЦАГИ[1]. В ноябре 1924 г. А.Н. Туполев приступил к проектированию тяжелого бомбардировщика для «Остехбюро», получившего название АНТ‑4, а позже – ТБ‑1.
В 1925 г. Бекаури предложил ЦАГИ начать работы по проектированию четырёхмоторного военного самолёта, названного ТБ‑3РТ3, где буква «Т», видимо, означала «транспортный», так как машина предназначалась для перевозки на наружной подвески крупногабаритной военной техники – танков, тяжелых артиллерийских орудий, вплоть до торпедных катеров.
25 ноября 1925 г. «Остехбюро» получило аванс в размере 100 тыс. рублей, а в декабре 1925 г. ЦАГИ под руководством А.Н. Туполева приступил к работе. Этот самолёт получил обозначение АНТ‑6, а позже – ТБ‑3. Таким образом, командование ВВС первое время даже не знало о работах над ТБ‑1 и ТБ‑3. Научно-технический комитет ВВС проявил интерес к АНТ‑6 лишь в июне 1926 г.
Для ТМС ТБ‑1 в «Остехбюро» была создана телемеханическая система «Дедал». Подъем телемеханического самолёта в воздух был сложной задачей, и ТБ‑1 взлетал с пилотом. При подлете к цели на несколько десятков километров пилот выбрасывался с парашютом. Далее самолёт управлялся по радио с «ведущего» ТБ‑1. Причем управление шло по УКВ и могло осуществляться только при прямой видимости. Когда телеуправляемый ТБ‑1 достигал цели, с ведущей машины шел сигнал на пикирование. Такие самолёты планировалось принять на вооружение в 1935 г.
Несколько позже «Остехбюро» занялось проектированием четырёхмоторного телеуправляемого бомбардировщика ТБ‑3. Как и ТБ‑1, новый бомбардировщик совершал взлет и маршевый полёт с пилотом. Но при подходе к цели пилот не выбрасывался с парашютом, а пересаживался в подвешенный к ТБ‑3 истребитель И‑15 или И‑16 (по схеме Вахмистрова) и на нем возвращался домой. Далее управление ТБ‑3 производилось с ведущего самолёта. Телеуправляемые бомбардировщики ТБ‑3 предполагалось принять на вооружение в 1936 г.
При испытаниях ТБ‑3 основной проблемой было отсутствие надежной работы автоматики. В рамках программы создания телемеханического ТБ‑3 было опробовано множество разных конструкций – пневматических, гидравлических и электромеханических. К примеру, в июле 1934 г. в Монино испытывался самолёт с автопилотом АВП‑3, а в октябре того же года – с автопилотом АВП‑7. Но до 1937 г. так и не было разработано ни одного более-менее приемлемого устройства.
В итоге 25 января 1938 г. тему закрыли, а три использовавшихся для испытаний бомбардировщика отобрали.
Наконец в 1937 г. должны были принять на вооружение «телемеханический» самолёт РД[2]. В отличие от телемеханических ТБ‑1 и ТБ‑3 для РД не требовался ведущий самолёт управления. РД мог в телеуправляемом режиме лететь 1000–1500 км по сигналам радиомаяков.

Бомбардировщик ТБ-3
Увы, ни один из этих самолётов на вооружение так и не поступил. Однако работы над телеуправляемыми самолётами продолжались и после разгона «Остехбюро». Так, 26 января 1940 г. вышло постановление СТО № 42СС о производстве телемеханических самолётов, в котором говорилось:
Обязать НКАП изготовить и сдать НКО в 1940 г. по тактико-техническим требованиям ВС по заводу № 379 НКАП:
1) телемеханические самолёты (ТС) со взлетом без посадки: ТБ‑3 к 15 июля; СБ к 25 августа;
2) телемеханические самолёты со взлетом и посадкой: ТБ‑3 к 15 октября; СБ к 25 ноября;
3) командные самолёты управления: СБ к 25 августа; ДБ‑3 к 25 ноября.
Испытания должны быть проведены в Кричевцах.
Начальнику 8ГУ и НИИ‑22 изготовить и сдать в 1940 г.:
а) телемеханический самолёт УТ‑2 со взлетом и посадкой к 15 августа;
б) командный самолёт управления к 15 августа.
В 1942 г. состоялись войсковые испытания телеуправляемого самолёта «Торпедо», созданного на базе бомбардировщика ТБ‑3. Самолёт ТБ‑3 был загружен 4 т взрывчатого вещества «повышенного действия». Наведение осуществлялось по радио с самолёта ДБ‑3Ф.
Самолёт ТБ‑3 «Торпедо», наводимый с ДБ‑3Ф, должен был поразить железнодорожный узел в занятом немцами городе Вязьма. Однако при подлете к цели антенна передатчика на ДБ‑3Ф вышла из строя, управление самолётом «Торпедо» было потеряно, и он упал куда-то за Вязьму.
Вторая пара ТБ‑3 «Торпедо» и самолёт управления СБ в том же 1942 г. сгорели на аэродроме при взрыве боеприпасов на стоявшем рядом бомбардировщике.
На этом работы по телемеханическим самолётам были прекращены.
Глава 3
Надводные и подводные дроны Владимира Бекаури
С начала 1920‑х гг. над советским руководством и его малограмотными маршалами и адмиралами довлел призрак Гранд-Флита. Это комсомольцы и пионеры лихо распевали: «…и на любой британский ультиматум воздушный флот сумеет дать отпор». А вот начальство смертельно боялось 15‑ и 16‑дюймовых пушек британских дредноутов. Наш флот строился исключительно с расчетом на бой на минно-артиллерийской позиции.
Бекаури, правильно оценив конъюнктуру в руководстве советских ВМС, предложил несколько проектов сверхмалых подводных лодок. Вот, мол, подойдет британский Гранд-Флит к Кронштадту или Севастополю на пушечный выстрел, а наши сверхмалые подводные лодки тут как тут. Мало того, сверхмалую подводную лодку можно доставить для диверсий и в отдаленные точки. Нет, не на верблюдах, а на… самолётах.
Идеи Бекаури заворожили наших военморов. И вот в 1934 г. в составе 1‑го отдела Остехбюро была создана конструкторская группа, проектировавшая подводные лодки. Главным конструктором 1‑го отдела был инженер Ф.В. Щукин, но общее руководство осуществлял Бекаури.
В этом отделе в 1934–1936 гг. параллельно проектировались: аэроподводный самодвижущийся снаряд (АПСС), позже её называли телемеханической подводной лодкой; автономная подводная лодка (АПЛ); радиотелеуправляемая подводная лодка; малая подводная лодка водоизмещением 60 т.
АПСС представляла собой сверхмалую (надводное водоизмещение 7,2 т, подводное 8,5 т) подводную лодку, вооруженную одним носовым неподвижным торпедным аппаратом. Управление производилось двумя способами: обычным (единственным членом её экипажа) и дистанционным. В последнем случае прорабатывалась возможность управления АПСС с так называемых «водителей» – с надводных кораблей или самолётов. «Волновое управление» должно было осуществляться с помощью установленной на этих «водителях» специальной аппаратуры «Кварц» (разработка № 134), созданной специалистами того же Остехбюро. В «телемеханическом» варианте АПСС вместо торпеды несла установленный на её месте заряд взрывчатки весом 500 кг.
Прочный корпус был сигарообразной формы, с двумя накладными килями, разделен на 5 отсеков. В съемном носовом отсеке размещался заряд ВВ, снабженный неконтактным взрывателем. Второй отсек содержал носовую полубатарею аккумуляторов (33 элемента) и часть вспомогательной аппаратуры телеуправления. Третий отсек – центральный – пост ручного управления. Здесь находились кресло водителя, штурвал, контрольные приборы и перископ, выдвигавшийся над корпусом на 65 сантиметров. Сверху место водителя закрывала прочная рубка с четырьмя иллюминаторами и входным люком. В отсеке также размещалась основная часть аппаратуры телеуправления, балластная, уравнительная и торпедозаместительная цистерны, механизмы управления торпедным аппаратом. В четвертом отсеке находилась кормовая полубатарея аккумуляторов (24 элемента) и часть аппаратуры телеуправления с рулевыми машинами, работающими на сжатом воздухе. В пятом отсеке размещался электромотор постоянного тока мощностью 8,1 кВт и гребной вал с винтом.
В корме имелось хвостовое оперение с рулями. В прочных килях были установлены 4 баллона на 62 литра сжатого воздуха, используемого для продувки цистерн и работы элементов автоматики. Между килями располагался открытый торпедный аппарат под 457‑мм торпеду.
Сверху на прочном корпусе были установлены мачты антенного устройства, а на верхней поверхности второго и пятого отсеков – иллюминаторы с фарами, направленными вверх, служившими для опознавания и наблюдения снаряда в темное время. На кормовом отсеке крепился прибор, периодически выбрасывающий в воду флуоресцирующий состав зеленого цвета, облегчавший слежение за снарядом в светлое время. Перед рубкой был установлен аварийный буй с электролампой и телефоном. Транспортно-подвесные узлы располагались сверху над вторым и четвертым отсеками, расстояние между узлами составляло 4,9 метра.
Основным режимом управления АПСС являлось управление по радио при визуальном слежении за ним с самолёта-водителя или корабля. Оно осуществлялось путем передачи шифрованных радиосигналов в УКВ‑диапазоне при надводном положении АПСС или в длинноволновом диапазоне при погружении на глубину 3 метра. АПСС имел специальные приемники УКВ и ДВ с дешифратором, который преобразовывал радиокоманды в посылки постоянного тока, управлявшие элементами автоматики снаряда. Вспомогательным режимом было механическое управление, которое использовалось с помощью механического автоматического курсопрокладчика. Этот режим использовался на глубине 10 метров, движение в таком режиме могло продолжаться до пяти часов. Предусматривалось и ручное управление, в котором все принципы управления сохранялись те же, что при радиоуправлении.
В качестве носителя и пункта воздушного управления АПСС планировался гидросамолёт АНТ‑22, созданный бюро А.Н. Туполева. АНТ‑22 мог транспортировать одну сверхмалую подводную лодку типа АПСС на внешней подвеске, а в переоборудованных поплавках даже две. Дальность полёта позволяла ему доставлять этот груз в точку, удаленную от базы на 500–600 км.
Идея доставки сверхмалой подводной лодки самолётом и управления её с самолёта была полнейшим техническим бредом. Тем не менее, А.Н. Туполев простроил опытный образец «морского крейсера» МК‑1 (АНТ‑22). «Крейсер» представлял собой цельнометаллический двухлодочный гидросамолёт-катамаран.

Гидросамолёт АНТ-22 с АПСС
Заводские испытания МК‑1 начались 8 августа 1934 г. и продолжились до 8 мая 1935 г. Машину испытывали летчики Т.В. Рябенко и Д.Н. Ильинский. Общая оценка самолёта такова: «Управляемость самолёта при различных комбинациях работы моторов следует признать хорошей». Максимальная скорость у поверхности воды составила 233 км/ч., на высоте 3000 м – 207 км/ч. Практический потолок 3500 м самолёт набирал за 57 мин., время виража составило 82–89 секунд.
После установки на самолёте штатного комплекта оборудования и вооружения он с 27 июля по 15 августа 1935 г. прошел полный цикл государственных испытаний. При наружной подвеске данные несколько снизились: максимальная скорость у поверхности воды составила 205 км/ч., крейсерская – 180 км/ч., практический потолок – 2250 м.
Увы, в середине 1935 г. работы над МК‑1 были прекращены, так как во второй половине 1930‑х гг. его лётные качества выглядели анахронизмом, и МК‑1 мог стать легкой добычей не только истребителя, но и современной «летающей лодки». Кроме того, для обслуживания такого гиганта требовалось большое количество технических средств и наземного персонала. Подготовка к полёту и само его обеспечение оказались слишком сложными и длительными.
В 1935 г., сразу после завершения проектирования АПСС, их строительство поручили Ленинградскому судостроительно-механическому заводу № 196 («Судомех»). Были построены две сверхмалые подводные лодки проекта АПСС, первая в 1935 г. в клепаном, а вторая в 1936 г. – в сварном исполнении. Обе сверхмалые подводные лодки проходили заводские испытания, но на вооружение их не приняли. В официальных отчетах о реализации данного проекта говорится, что «проблема дистанционного управления этой лодкой далека от положительного решения». До испытаний с участием водителей дело вообще не дошло, и перед началом Второй мировой войны сверхмалые подводные лодки АПСС разобрали.
Параллельно работали над ещё одним чудом для поражения Гранд-Флита.
Предположим, злодей подходит на дистанцию огня орудий главного калибра к Кронштадту или Севастополю. Но вот с разных направлений дредноуты атакуют десятки торпедных катеров, которые подходят почти в упор и топят «просвещенных мореплавателей». Пусть большинство катеров потоплено артиллерийским огнем. Но потерь среди красных военморов нет. Катера управляются по радио с эсминцев и самолётов. Такая идиллия не могла не привести в умиление наших военморов, и Бекаури получил новые деньги, новые заводы и десятки катеров для опытов.
Уже в 1924 г. к работе по телеуправлению катеров подключилась группа талантливого изобретатель А.Ф. Шорина, создателя советского звукового кино. Хотя основной принцип – управление с помощью радиоволн – у обоих конструкторов был одинаков, разрабатываемые ими системы отличались одна от другой. Бекаури, стремясь облегчить работу оператора, включил в свой комплекс счетно-решающий прибор, который автоматически вырабатывал курс выхода телеуправляемого катера в атаку. В комплексе Шорина курс рассчитывал по карте оператор. Кроме того, Бекаури размещал станцию управления на корабле, а Шорин – на самолёте, с которого, как он считал, можно раньше обнаружить корабли противника и вывести в атаку на них радиоуправляемые катера.
В 1927 г. в Гребном порту в Ленинграде председателю ВСНХ В.В. Куйбышеву продемонстрировали управление по радио при помощи системы Шорина небольшим катером «Оса». Куйбышев и в последующие годы посещал лабораторию Шорина, интересовался результатами деятельности её коллектива.
Получив заказ от Морских сил, Шорин проделал большую работу по созданию аппаратуры для радиотелеуправления торпедным катером. Для обеспечения испытаний флот передал его лаборатории трофейный английский торпедный катер типа «Торникрофт» и штабной катер «Орлик».
К маю 1930 г. лаборатория создала первый образец радиоаппаратуры для установки на серийном катере типа Ш‑4 и самолёте типа ЮГ‑1. Место командира-оператора, который должен был управлять торпедным катером по радио, перенесли, таким образом, в воздух. С высоты в несколько тысяч метров, считал А.Ф. Шорин, будет возможно на большом расстоянии обнаруживать корабли противника и выводить на них в атаку радиоуправляемые катера.
Начались полигонные испытания комплекса Шорина. Вначале настройка и проверка аппаратуры велась на катере у стенки завода. Самолёт летал где-то недалеко переменными галсами, с него шли радиокоманды, а инженеры работали с приборами на Ш‑4.

Малый торпедный катер Ш-4
Общим в комплексах А.Ф. Шорина и В.И. Бекаури был принцип управления торпедным катером по радио. Но имелись и некоторые отличия. Во-первых, командир-оператор и станция управления у В.И. Бекаури размещались на корабле, а не в воздухе – флот для этого выделил миноносец «Конструктор». Во-вторых, Остехбюро включило в состав станции управления специальный счетно-решающий прибор. Выйти в торпедную атаку не так-то просто. Ведь корабль противника маневрирует, а катеру нужно дать торпедный залп на расстоянии всего лишь около одного километра от цели. Но для этого нужно занять такую позицию торпедного залпа, чтобы цель не успела уклониться от несущихся к ней двух торпед. Для выхода в эту позицию командир катера все время делает необходимые расчеты. В.И. Бекаури решил автоматизировать эти расчеты. В счетно-решающий прибор вводились расстояния и курсовые углы. По ним прибор определял курс и скорость противника и вырабатывал курс выхода торпедного катера в атаку. Оставалось снять с него показания и передать на катер по радио соответствующие команды. Таким образом, в комплексе В.И. Бекаури курс выхода в атаку катера определялся прибором, а в комплексе А.Ф. Шорина его нужно было рассчитывать самому оператору – на карте или планшете. Создание счетно-решающего прибора для того времени было значительным техническим достижением.
К 1937 г. в катера «волнового управления» были обращены торпедные катера Ш‑4 и Г‑5 – 18 на Балтике и 12 на Чёрном море.
На зачетном флотском учении в октябре 1937 г. отрабатывался бой с эскадрой противника на минно-артиллерийской позиции. Когда соединение, изображающее вражескую эскадру, появилось в западной части Финского залива, более полусотни радиоуправляемых катеров, прорыв дымовые завесы, устремились с трёх сторон на корабли противника и атаковали их торпедами. После учения дивизион радиоуправляемых катеров получил высокую оценку командования.
Первоначально наведение катеров велось с поплавкового бомбардировщика ТБ‑1. На самолёте устанавливали аппаратуру управления «Кварц», а на катере – «Вольт-Р». Все работы по монтажу системы телеуправления выполнял завод № 192.
Серийно аппаратуру ставили на итальянских летающих лодках «Савойя С‑62бис» (МБР‑4). В конце 1930‑х гг. «Савойя» были заменены на МБР‑2.
Поскольку с дюралевыми торпедными катерами возникали серьезные проблемы, о которых мы поговорим позже, Бекаури ещё в 1928 г. предложил построить более крупные и килевые стальные катера «волнового управления».
Два катера – С‑1 (В‑1) [3] и С‑2 (В‑2) – были заложены в 1930 г. на заводе им. Марти в Ленинграде и уже в июле того же года введены в строй. Их включили в состав Балтийского дивизиона особого назначения, который состоял из радиоуправляемых глиссеров.
Водоизмещение С‑1 и С‑2 составляло 28 т; длина 23,5 м; ширина 3,8 м; осадка 1,4 м. На катерах были установлены импортные бензиновые двигатели суммарной мощностью 2250 л.с., но скорость хода их не превышала 26 узлов. Запас топлива обеспечивал дальность плавания 170 миль. Вооружение состояло из трёхжелобных 450‑мм торпедных аппаратов и двух 7,62‑мм пулеметов ШВАК. Экипаж – 6 человек. Катера оказались неудобными и в серию не пошли, тем более и сама идея радиоуправляемого катера и его лидера была признана порочной. В годы Великой Отечественной войны катера С‑1 и С‑2 переоборудовали в малые минные заградители для действий в Финском заливе и на Ладожском озере.
Несмотря на все усилия, систему волнового управления довести до ума к 22 июня 1941 г. так и не удалось. Аппаратура давала много отказов. Наведение на цель самолёта МБР‑2 могло вестись только при условиях хорошей видимости. Да и сами тихоходные летающие лодки были хорошей добычей для истребителей противника.