- Рейтинг Литрес:3.5
Полная версия:
Юрий Берков Водолазная электроника
- + Увеличить шрифт
- - Уменьшить шрифт

Водолазная электроника
Юрий Берков
© Юрий Берков, 2023
ISBN 978-5-4493-6821-8
Создано в интеллектуальной издательской системе Ridero
Юрий Берков

ВОДОЛАЗНАЯ
ЭЛЕКТРОНИКА
История и перспективы развития

2018г.
Предисловие
Водолазное дело с каждым годом всё прочнее входит в нашу повседневную жизнь. Водолазы применяются, как для решения различных народнохозяйственных, так и военных задач.
Это и поиск затонувших предметов, спасательные и судоподъёмные работы, противодиверсионная и противодесантная оборона, скрытная доставка разведгрупп на побережье противника, проникновение в военно-морские базы и порты, подводные инженерные работы.
Кроме того, это чисто спортивные и туристические водолазные погружения (дайвинг). А также подводная археология, спелеология, геология, экология, ихтиология.
Всё это требует развития и совершенствования, как самого водолазного снаряжения, так и приборов подводной навигации, связи, привода, поиска, а также средств передвижения водолазов под водой.
При этом должна быть обеспечена необходимая длительность и безопасность водолазных спусков, как на малых, так и на больших глубинах.
Иными словами, водолаз должен чувствовать себя под водой как рыба в воде.
За последние годы в мире немало сделано для развития водолазного дела. Наша страна тоже имеет заслуги в этом направлении. Именно у нас в 1990 году впервые достигнута глубина погружения водолазов 500м. Именно наши акванавты жили и выполняли работы под водой на предельных глубинах в барокамерах в течение 32-х суток. Только у нас построено спасательное судно «Игорь Белоусов», обеспечивающее длительные работы водолазов на глубинах до 450м.
Но решены далеко ещё не все задачи подводного поиска, подводной навигации, привода и связи. Именно на них я и хочу остановиться в своей книге. Их эффективное решение возможно только путём создания необходимых электронных приборов для водолаза. Многое у нас уже сделано в этом направлении, но многое ещё предстоит сделать. Есть интересные идеи и интересные конструкции электронных средств. Всё это может быть полезно специалистам конструкторских бюро и студентам технических ВУЗ-ов страны.
Глава 1. Введение в физику моря
1.1. Акустические свойства водной среды
Работа гидроакустических приборов водолаза основана на способности звуковых волн распространяться в воде с малым затуханием. Из-за высокой плотности воды (вода в 800 раз плотнее воздуха) поглощение звука в воде почти в 300 раз меньше, чем в воздухе. В результате звук способен распространяться в воде на сотни и тысячи метров, при достаточно малых мощностях излучения (единицы ватт). Скорость распространения звука в воде почти в 5 раз выше, чем в воздухе. Если в воздухе звук распространяется со скоростью 330 м/с, то в воде скорость звука составляет в среднем 1500 м/с. Она может изменяться в зависимости от температуры, солёности и давления в относительно небольших пределах +35; – 25 м/с. Однако и это имеет существенное значение для траектории звуковых лучей.
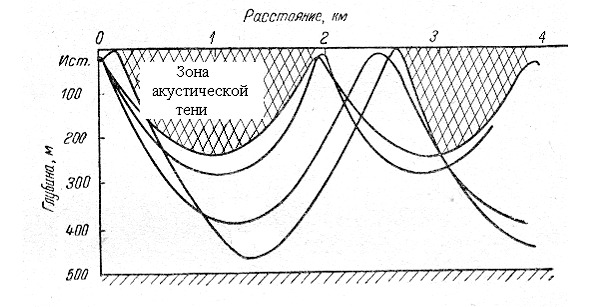
1.1.1. Изменение скорости звука в слоях воды с разной глубиной из-за разности температур приводит к искривлению (), звуковых лучей, что влияет на дальность действия гидроакустических приборов. При искривлении лучей в сторону дна (отрицательная рефракция) дальность действия гидроакустических приборов резко снижается. Определяется она верхним звуковым лучом, скользящим по поверхности воды и уходящим вглубь. Поэтому возникает зона акустической тени на малых глубинах. рефракции
Отрицательная рефракция возникает тогда, когда температура воды падает с глубиной. Это характерно для летнего времени, особенно в дневные часы, когда верхний слой воды прогрет солнцем и имеет более высокую температуру (рис. 1). Однако в прибрежных мелководных районах глубокой акустической тени, как правило, не бывает в результате многократного отражения звука (реверберации) от грунта и поверхности воды. Возможны лишь флуктуации звука по амплитуде. Т.е. мы можем иметь отдельные зоны неустойчивого гидроакустического контакта. Тут всё зависит от мощности источника звука и дистанции до него. Мощность гидроакустических приборов водолаза не велика и дальность их действия составляет, как правило, сотни, но иногда и более 2 -3 тысяч метров.
Рис. 1. Траектории звуковых лучей при отрицательной рефракции в глубоком море.
Положительная рефракция (рис. 2) возникает, когда скорость звука с глубиной повышается. Она характерна для зимнего периода, когда верхние слои воды холоднее нижних. Дальность действия гидроакустических приборов определяется нижним звуковым лучом. Зона акустической тени находится на больших глубинах.
Рис. 2. Траектории звуковых лучей при положительной рефракции в глубоком море.
В поверхностном слое наблюдается многократное отражение звуковых волн.
Изотермия (постоянная температура воды на всех глубинах) характерна для весенне-осеннего периода, а также после шторма на небольших глубинах. Обычно это кратковременное явление (наблюдается от нескольких часов до нескольких суток). Звукоподводная связь при изотермии устойчива на всех глубинах.
Подводный звуковой канал возникает, как правило, на больших глубинах (сотни метров), когда в верхних слоях моря рефракция отрицательная, а в нижних – положительная (из-за роста давления). Водолазы с ним, как правило, не сталкиваются. Дальность распространения звуковых волн в подводном звуковом канале может составлять сотни километров. Этим пользуются подводные лодки.
Слой скачка, это верхний слой воды с температурой значительно более высокой, чем нижние слои. Такой слой возникает при прогреве солнцем верхних слоёв моря на глубину 5 – 10м., как правило, в конце жаркого дня. Звуковые волны отражаются от него, не выходя на поверхность. Погрузившись под слой скачка, водолаз может потерять связь с обеспечивающим катером.
1.1.2. На дальность действия гидроакустических приборов влияет также , т.е. отражение звука от пузырьков газа в воде и планктона (объёмная реверберация), от поверхности моря (поверхностная реверберация) и от грунта (донная реверберация). реверберация
Объёмная реверберация обычно сильна в прибрежных районах, где много планктона и пузырьков воздуха из-за образования пены при набегании волн на прибрежную отмель.
Донная реверберация характерна для малых глубин и зависит от характера грунта. Если он каменистый или песчаный, то донная реверберация значительна (отражается до 30 – 40% энергии звука). Если грунт илистый и покрыт водорослями – донная реверберация может отсутствовать.
Реверберация всегда сопровождается интерференцией звуковых волн. Это приводит к образованию максимумов и минимумов акустической освещённости – звуковых полос. В результате, при движении водолаза или подводного средства движения (ПСД), звук всё время флуктуирует по амплитуде. В аппаратуре связи и привода водолазов принимаются защитные меры от этих флуктуаций в виде автоматической регулировки усиления.
Поверхностная реверберация зависит от волнения моря. Если оно спокойно, то полосы интерференции чёткие. Если море 2 – 3 балла, то полосы смазаны и не мешают гидроакустической связи.
Для борьбы с поверхностной и донной реверберацией в гидролокаторах водолаза применяются остронаправленные гидроакустические антенны, луч которых не касается дна и поверхности моря.
От частоты звуковых колебаний зависит и поглощение звука в воде. Чем выше частота, тем сильнее поглощение. Вот почему высокочастотные приборы имеют малые дальности действия. В таблице 1 приведены уровни затухания звуковых волн в зависимости от частоты излучения.
Таблица. 1.
Примечание: 6 дБ соответствуют затуханию в 2 раза; 20 дБ соответствуют затуханию в 10 раз; 40 дБ соответствуют затуханию в 100 раз; 60 дБ соответствуют затуханию в 1000 раз.
Таковы, в основном, акустические свойства водной среды.


1.2. Оптические свойства водной среды
Оптические свойства морской воды характеризуются её прозрачностью. Прозрачность определяется дальностью видимости водолазом белого диска диаметром 20см. При дальности видимости более 10м прозрачность считается хорошей. Максимальная прозрачность воды бывает вдали от берега, на больших глубинах. Там она может достигать 50 и более метров.
В близи побережья прозрачность обычно снижена до 4 – 6м за счёт планктона, взвесей в виде песка и ила. Часто прозрачность в прибрежных районах (особенно в устьях рек) не превышает 0,5м. Прозрачность сильно снижается во время и после шторма. В связи с этим применение для подводного поиска фото и телекамер в прибрежных районах сильно затруднено. Применение подсветки в виде сине-зелёных лазеров позволяет увеличить дальность действия фото и телекамер в 1,5 – 2 раза.
Наиболее сильно в воде затухает красный свет (инфракрасный вообще не проходит). Поэтому применение красных светодиодов для индикации состояния приборов и красных цветов экрана жидкокристаллических панелей возможно только на близком расстоянии (до 0,3м) от глаз водолаза.
Ещё одним фактором, который может отрицательно влиять на видимость приборов водолаза на малых глубинах это солнечная засветка.
В солнечный день от поверхности волн отражается множество солнечных зайчиков, которые засвечивают приборы водолаза (часы, компас, глубиномер и др.). В старых приборах (гидролокаторы, пеленгаторы) с электронно-лучевыми трубками солнечные зайчики засвечивали белые экраны ЭЛТ и надо было принимать меры к их затенению (обычно головой водолаза).
В новых планшетах с жидкокристаллическими панелями их экран тёмный и свет не отражает. Однако есть защитное стекло, которое может создавать блики и мешать работе водолаза. Блики могут создавать также хромированные (никелированные) ручки и кнопки, а также блестящие (полированные) корпуса приборов. Поэтому корпуса приборов желательно окрашивать в чёрный матовый цвет.
1.3. Электрические свойства водной среды
1.3.1. Чистая дистиллированная вода является диэлектриком и не проводит электрический ток. Однако в природе дистиллированной воды практически не бывает. Даже в пресной речной воде растворены различные соли, которые делают её электропроводной.
Морская вода имеет солёность от 20 до 35 промиль и является хорошим проводником электрического тока. В ней растворены соли натрия, кальция и др. металлов. Сопротивление морской воды составляет около 2 Ом. Это приводит к тому, что все электрические приборы, которые теряют герметичность и в них проникает морская вода, быстро выходят из строя. Особенно часто затекают контактные разъёмы аппаратуры. За ними нужен постоянный контроль и уход (смазка вазелином, циатимом-201 или специальной консистентной смазкой). По возможности следует применять бесконтактные индукционные разъёмы.
Если морской водой залит силовой разъём аккумуляторной батареи, то возникает короткое замыкание. Электролит в аккумуляторных банках может закипеть. Возникает большое количество газов. В аккумуляторном отсеке повышается давление, что может привести к взрыву. Взрыв под водой очень опасен для водолаза, поскольку может привести к баротравме лёгких.
1.3.2. Высокую электропроводность воды в 80-х годах прошлого века пытались использовать для связи между водолазами. Для этого в г. Омске была изготовлена аппаратура «Бастион» (в корпусе станции гидроакустической связи МГВ-6В). На гидрокостюм водолаза наклеивались электроды из алюминиевой фольги (на ноги и руки). Через воду пропускался электрический ток от микрофонного усилителя водолаза. Аппаратура другого водолаза принимала сигнал на такие же электроды, (чувствительность 1 мкВ.) усиливала его и подавала на телефоны.
Испытания аппаратуры проводились на Каспии в г. Баку (автор книги участвовал в этих испытаниях от 40 ГНИИ МО). Они показали, что при выходной мощности 5 Вт. связь между водолазами возможна на расстоянии до 25м. При увеличении антенной базы до 50м. (электроды – корпус водолазного катера и подвешенная за ним на буйке металлическая пластина) дальность связи увеличивалась до 150м. Антенны улавливали гальванические токи растекания, которые создавали металлические пластины-электроды.
Дело в том, что силовые линии тока отталкиваются друг от друга из-за одинакового заряда движущихся в воде электронов (ионов). Поэтому они образуют широкий веер силовых линий между двумя полюсами. Это и позволяет принимать сигнал другому водолазу или катеру.
В целом, испытания признаны успешными, но дальность связи – недостаточной. Поэтому аппаратура серийно не выпускалась.
1.3.3. По причине своей высокой электропроводности морская вода почти не пропускает радиоволны. Они затухают в ней, образуя вихревые токи Фуко. Чем выше частота, тем сильнее затухание. В пресной воде (река, озеро) длинные радиоволны проникают в воду на глубину до 3 – 5 м. (работает радиоприёмник в СВ и ДВ – диапазонах). В море длинные волны проникают на глубину нескольких сантиметров. Сверхдлинные волны (длиной в несколько километров) проникают в морскую воду на глубину до 40м. Этим пользуются подводные лодки, для приёма сигналов с береговых постов связи.
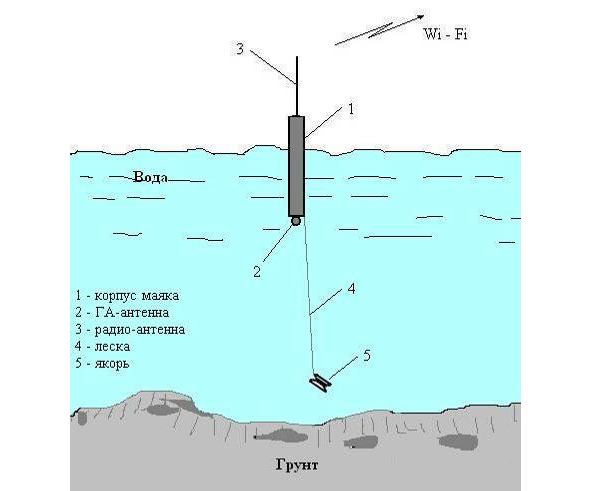
Водолазов интересуют сверхкороткие радиоволны СВЧ—диапазона. Они применяются в системах спутниковой навигации GPS / ГЛОНАСС и в роутерах Wi-Fi. Такие радиоволны могут приниматься только антеннами, находящимися в надводном положении.
Антенна может подниматься над водой рукой водолаза при подвсплытии или пенопластовым буйком, соединённым гибким кабелем с приёмной аппаратурой, при движении водолаза на ПСД. Возможна связь водолазов с береговыми службами с помощью радио-гидроакустического маяка (рис. 3).
В этом случае, водолазы принимают гидроакустические сигналы маяка, а он принимает радиосигналы с берега и ретранслирует на берег сигналы водолазов или их приборов.
Рис. 3. Радио-гидроакустический маяк для ретрансляции сигналов водолазов или показаний их приборов.
Радио-гидроакустический маяк также может использоваться для управления с берега автономным необитаемым подводным аппаратом.
Глава 2. Подводная навигация
Существует несколько способов определения места водолаза и подводных средств движения (ПСД) под водой:
– плавание по счислению;
– ориентация (определение места) по спутниковой навигационной системе GPS или «ГЛОНАСС» при подвсплытии;
– ориентация по гидроакустическим маякам.
2.1. Плавание по счислению
Является наиболее простым и наименее точным методом определения места водолаза, при плавании на ластах или на подводных средствах движения (буксировщиках, носителях водолазов).
В начале определяются координаты точки погружения водолаза. Они могут быть привязаны к географической карте или к точке определения места по GPS – ГЛОНАСС на маневренном планшете.
Затем координаты заносятся в систему счисления, и прокладывается траектория движения водолаза. В простейшем случае это может быть курс по магнитному компасу.
Далее счисление места может вестись по показаниям лага, компаса и глубиномера. Если лага нет, то используются часы и скорость, определённая на мерной линии для данного режима (темпа) движения. Эти показания перемножаются и дают пройденную дистанцию.
2.1.1. Навигационные приборы счисления места первого поколения
В ХХ веке в нашей стране был создан ряд навигационных приборов, позволяющих вести счисление места водолаза. Так, в начале 70-х годов в Советском Союзе (НИИ ШП «Дельфин», г. Ленинград) был создан навигационный прибор водолаза НПВ-2 (рис. 4).
Рис. 4. Буксировщик водолаза «Протон» с навигационным прибором водолаза НПВ-2.
Цифрами на рисунке обозначены: 1 – прибор НПВ-2; 2 – магнитный компас «Дружба»; 3 – часы «Восток-амфибия»; 4 – глубиномер Г-5; 5 – индикатор скорости и дистанции; 6 – место для плёночного планшета.
Прибор имел в своём составе магнитный компас, часы, глубиномер и механический (вертушечный) лаг, который измерял скорость при помощи вращающегося набегающим потоком воды винта. Он же измерял и пройденную дистанцию. Прибор устанавливался на всех видах буксировщиков и мог буксироваться водолазом вручную. На передней площадке прибора НПВ-2 мог быть закреплён плёночный планшет с картой и оптическим пеленгатором (съёмным).
В 2008г. (после перестройки) были проведены межведомственные испытания подводного навигационного прибора УПН-1 (производства Котав-Ивановского завода).
Навигационный прибор УПН-1 (рис. 5) позволяет определять:
– направление по магнитному компасу в подводном и надводном положениях;
Рис. 5. Навигационный прибор водолаза УПН-1.
Цифрами на рисунке. обозначены: 1 – поворотные ручки с источниками питания для подсветки приборов; 2 – электронные часы и лаг; 3 – магнитный компас; 4 – глубиномер; 5 – место для маневренного планшета.
Технические характеристики навигационного прибора УПН-1:
– максимальная глубина погружения – до 40 м;
– время непрерывной работы – не менее 10 часов;
– точность курсоуказания по магнитному компасу – не менее +1º;
– точность определения глубины – 1 м;
– погрешность определения пути и скорости – не более 2%;
– два уровня подсветки приборов;
– съемный планшет для маршрутного задания;
– масса – 3 кг.
Рис. 6. Плавание на буксировщике «Протон-С» с навигационным прибором УПН-1.
Навигационный прибор УПН-1 может применяться водолазом автономно, в дневное и ночное время (с использованием подсветки). Органы управления рассчитаны на работу в водолазных перчатках. Навигационный прибор УПН-1 имеет цифровую калибровку лага.
Недостатками указанных выше приборов счисления первого поколения являются:
– постоянно нарастающая ошибка счисления места при продолжительном плавании;
– сложность точного учёта погрешностей магнитного компаса (девиации и склонения);
– плохая читаемость показаний приборов в мутной воде;
– увеличение ошибки измерения скорости и дистанции механического (вертушечного) лага со временем за счёт износа трущихся поверхностей или их загрязнения;
– невозможность учёта приливо-отливных, ветровых и постоянных течений.
Всё это делает невозможным длительное плавание водолаза и ПСД по счислению из-за больших навигационных ошибок.



2.1.2. Навигационные приборы счисления места второго поколения
В последние годы нашим специалистам удалось значительно повысить точность плавания водолаза и ПСД по счислению за счёт внедрения:
– цифровых магнитных компасов;
– электронных глубиномеров;
– абсолютных (доплеровских) гидроакустических лагов.
– бесплатформенных инерциальных систем.
представляет собой прибор, у которого нет вращающейся картушки или магнитной стрелки, а положение в магнитном поле Земли определяется с помощью магнитных (магнитометров, магниторезисторов) или индукционных датчиков. 2.1.2.1. Цифровой магнитный компас
Для примера рассмотрим цифровой магнитный компас ЦМК-01 (рис. 7). Он предназначен для измерения трёх компонент магнитного поля Земли и определения магнитного азимута.
Основными конструктивными узлами являются:
– трехкомпонентный магнитометрический гальваномагнитный преобразователь;
– цифровой интерфейс обмена данными;
– высокая частота выдачи измерений;
– встроенный цифровой датчик температуры для температурной компенсации результатов измерений.
Рис. 7. Цифровой магнитный компас ЦМК-01.
Основные технические характеристики компаса ЦМК-01 приведены в таблице 2.
Таблица 2.
Структурная схема ЦНК-01 приведена на рис. 8.
Большим преимуществом цифровых магнитных компасов перед обычными (стрелочными, картушечными) является наличие микроконтроллера, позволяющего автоматически вводить поправки на магнитное склонение и девиацию, что значительно повышает точность курсоуказания. Другим преимуществом является возможность отображения курса на цифровом индикаторе или электронном планшете с хорошей читаемостью ночью или в мутной воде.
Рис. 8. Структурная схема компаса ЦНК-01.
В последние годы появились цифровые компасные платы (рис. 9), которые легко встраиваются в цифровой навигационный комплекс.
Рис. 9. Цифровая компасная плата HMR3100 на индукционных датчиках.
В состав платы входит аксельрометр для компенсации дифферента.
(датчики глубины) представляют собой механоэлектрический преобразователь – сенсор, то есть устройство, преобразующее давление, в электрический параметр: сопротивление, емкость, электрический заряд и т. д. Сенсор должен иметь чувствительный элемент (ЧЭ), который воспринимает распределенную по поверхности силу и преобразует механическую энергию в электрическую. Идеальным решением для создания сенсора давления в нашей стране оказалось применение структуры кремний на сапфире (КНС). 2.1.2.2. Электронные глубиномеры
Выбор сенсора КНС типа объясняется наличием отечественных производителей данного типа приборов, высокими исходными метрологическими характеристиками. Это позволило создать малогабаритные электронно-цифровые глубиномеры с диапазоном измерения глубин 1 – 10000м. и погрешностью измерений 0,06% (рис. 10.) Созданы также индукционные и ёмкостные датчики давления.
Рис. 10. Электронный датчик глубины на основе КНС.
(рис. 11) измеряют скорость судна относительно грунта. Все разработанные в настоящее время малогабаритные абсолютные лаги являются высокочастотными. 2.1.2.3. Абсолютные (доплеровские) гидроакустические лаги
Принцип их работы основан на использовании эффекта Доплера. Импульс ультразвуковых колебаний, посылаемых с судна, отражается от грунта и возвращается обратно к судовому приемнику лага. При движении судна частота принятого сигнала будет отличаться от излучаемой в зависимости от скорости хода. Принцип работы ГАЛ заключается в измерении доплеровского сдвига частоты высокочастотного гидроакустического сигнала, посылаемого с судна и отражённого от поверхности дна. Результирующей информацией являются продольная и поперечная составляющей путевой скорости. ГАЛ позволяет измерить их с погрешностью до 0,1%. Разрешающая способность высокоточных ГАЛ составляет 0,01 уз.
Рис. 11. Характеристики направленности антенн ГАЛ. Цифрами на рисунке обозначены акустические лучи от антенн.
Большинство существующих ГАЛ морских судов обеспечивают измерение абсолютной скорости при глубинах под килём до 200—300 м. При больших глубинах лаг перестаёт работать или переходит в режим измерения относительной скорости, т.е. начинает работать от некоторого слоя воды как относительный лаг. Антенны ГАЛ не выступают за корпус судна.
Для водолазов и ПСД ГАЛ должен иметь минимальные габариты, поэтому рабочая частота его выбирается в диапазоне 200 – 300кГц. Это обеспечивает измерение глубины и скорости ПА (ПСД) до 50м.
В начале 90-х годов в СССР была завершена разработка малогабаритных лагов ЛА-51, ЛА-52 и ЛА-53, обладавших повышенными точностными и эксплуатационными характеристиками. Причем, информационные возможности двух последних были значительно расширены за счет обеспечения измерений (помимо абсолютной и относительной скорости корабля) скорости и направления течений на различных горизонтах, глубины моря в точках падения на грунт акустических лучей лага и отстояния этих точек от антенной системы. ГАЛ ЛА-51 был установлен на ПСЛ «Сирена-М» и прошёл государственные испытания.