Геннадий Гоголев
Эксплуатация современных судовых дизельных установок
Раздел 2. Режимы работы СДЭУ
2.1. Общая характеристика режимов СДЭУ
Эксплуатация СДЭУ происходит в различных условиях и характеризуется целым рядом показателей.
Режимы работы главного двигателя, являющегося основным элементом СДЭУ и ПК в целом, определяются типом судна, конкретными условиями его плавания, конструктивными особенностями корпуса судна, движителя, редуктора, машинной установки, а также способом передачи мощности.
Под режимом работы ГД обычно понимают эксплуатационное состояние двигателя, его систем и потребителя энергии [1].
Любой режим СДЭУ характеризуется комплексом технико-эксплуатационных показателей и прежде всего нагрузкой ГД и частотами вращения двигателя и винта, а также эксплуатационными показателями (температурами, давлениями, расходами рабочих сред), которые не должны выходить за допустимые значения.
Изменение режима может происходить преднамеренно (изменение скорости или направления движения судна) или случайно под влиянием внешних неуправляемых факторов воздействия.
Режимы работы бывают установившимися и неустановившимися.
Установившиеся режимы характеризуются постоянством во времени показателей работы. Неустановившиеся режимы характеризуются изменением показателей. Неустановившиеся режимы возникают при пуске, трогании судна с места, маневрировании, реверсировании, работе в штормовых условиях и др.
Различают номинальные и неспецификационные режимы СДЭУ. Номинальные режимы гарантируются изготовителем и оговариваются условиями на поставку, а неспецификационные режимы требуют введения дополнительных ограничений.
Особенности и специфика режима работы ДЭУ зависит от состава установки.
2.2. Установившиеся режимы совместной работы ГД и гребного винта
2.2.1. Совместная работа ГД и ВФШ
На рис. 2.1. изображены зависимости, определяющие возможные режимы работы дизеля с ВФШ при прямой передаче. Возможные режимы совместной работы получаются при пересечении винтовых характеристик, характеризующих сопротивление движению судна, с внешними, регуляторными или ограничительными характеристиками. Мощность, поглощаемая гребным винтом, зависит от конструкции корпуса судна и состояния моря.
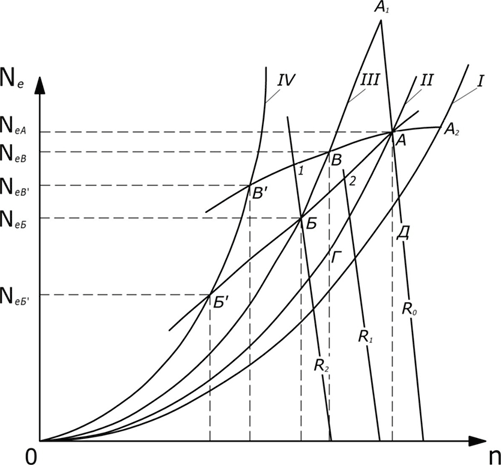
Рис. 2.1. Режимы совместной работы дизеля с ВФШ [9].
Винтовые характеристики описывают показательной функцией
NВ = с nm,
где с – коэффициент пропорциональности;
nв – частота вращения.
Показатель степени m для современных водоизмещающих судов составляет 2,9…4,5; а для глиссирующих катеров – 1,6…3,2.
Кривая II представляет собой номинальную винтовую характеристику, относящуюся к расчетным условиям движения судна в полном грузу. Кривые 1 и 2 – соответственно внешняя и ограничительная характеристики дизеля, кривые III и IV – утяжеленные винтовые характеристики, кривая I – винтовая характеристика при плавании судна в балласте. Линии R0, R1, R2 – регуляторные характеристики.
Пересечение нормальной винтовой характеристики двигателя с его номинальной внешней и ограничительной характеристиками (точка А) определяет величину допустимой длительной нагрузки и частоту вращения вала ГД (и гребного винта).
При плавании судна в балласте винтовая характеристика становится «облегченной», что связано с уменьшением осадки и, как следствие, снижением сопротивления воды движению судна. При той же частоте вращения гребного винта скорость судна возрастает.
В условиях эксплуатации довольно часто наблюдается так называемое утяжеление винтовой характеристики (кривая III). Это может быть вызвано увеличением осадки, обрастанием корпуса, волнением моря, перекладками руля при маневрировании, влиянием мелководья, буксировкой воза, тралением, работой на швартовах и др.
При работе по утяжеленной винтовой характеристике (рисунок 2.1, кривая III) допустимая нагрузка определяется положением точки Б, лежащей на ограничительной характеристике, которая условно показана прямой линией, а не ломанной кривой. В дальнейшем виды ограничительных характеристик будут рассмотрены более подробно.
Работа на швартовах соответствует кривая IV; предельную нагрузку на ней определяет точка Б'. Точка В' соответствует, значительной перегрузке при работе по внешней характеристике.
Винтовая характеристика при движении судна может располагаться левее, чем швартовная. Это может происходить на второй стадии реверса при подаче контрвоздуха, когда судно по инерции еще движется вперед, а двигатель уже раскручивает винт на задний ход. ГД в этих случаях значительно перегружается.
Мощность двигателя используется полностью при номинальном числе оборотов, в точке пересечения винтовой и внешней номинальной характеристик.
Значительная недогрузка двигателя сопровождается увеличением удельного расхода топлива, и при пониженных оборотах приводит к неустойчивой его работе, если не предусмотрены специальные конструктивные мероприятия, например, аккумуляторные системы топливоподачи.
Для судна, движущегося с определенной эксплуатационной скоростью, при определенном неизменном водоизмещении можно подобрать оптимальный винт, обеспечивающий наиболее высокий для данных условий коэффициент полезного действия, но только при nном. Теоретическая винтовая характеристика при этом проходит через точку А.
Сегодня широко распространена практика проектирования ДЭУ с винтами облегченного типа. Облегченная винтовая характеристика располагается правее теоретической, образуя 10…20 % запас по мощности. Наличие такого запаса позволит в штормовую погоду и при других сложных условиях плавания поддерживать частоту вращения, а с ней и скорость судна на прежнем уровне без перегрузки ГД.
Если произойдет утяжеление винтовой характеристики, то КПД винта, спроектированного на максимальное значение ηp при эксплуатационной или номинальной частоте вращения, будет снижаться, а коэффициенты к1 и к2 возрастать (рис 1.1).
Потребляемая эффективная мощность Ne будет уменьшаться (точки B или Б на рис 2.1) и для обеспечения прежних оборотов ГД и скорости судна потребуется увеличение мощности и крутящего момента (точка А1). Возникшая перегрузка двигателя приведет к росту максимального давления сгорания Pz, температуры выхлопных газов и удельного расхода топлива.
При плавании в балласте с уменьшенной осадкой сопротивление движению судна снижается, винтовая характеристика смещается вправо («легкий винт»), поступь винта растет, КПД винта резко снижается, коэффициенты момента и упора уменьшаются.
Момент сопротивления Mc в этом случае буде значительно меньше крутящего момента развиваемого ГД при nном. Если ничего не предусмотреть, то ГД будет разгоняться до перегрузочного режима по частоте вращения, находящегося в точке пересечения мощностей соответствующих указанным моментам (точка А2). Подачу топлива и мощность ГД надо снизить, поддерживая при помощи регулятора приемлемые значения частоты вращения (не более 103…105 % nном).
При спокойной погоде скорость судна увеличивается на 1…2 узла за счет снижения сопротивления движению при меньшей осадке. Однако при сильном волнении моря высокую скорость обеспечить не удастся из-за ухудшения остойчивости судна и увеличения динамических нагрузок.
Для ВФШ рекомендуют подбирать эксплуатационную мощность при номинальной частоте вращения [1]. При этом соответствие между номинальной мощностью и номинальной частотой вращения будет достигнуто позже, при обрастании корпуса судна или при ухудшении условий плавания (волнение, движение во льдах, встречные течения и ветер).
В современных установках с ВФШ получили распространение винты с оребренным обтекателем ступицы ГВ и обтекателями с крыльевыми элементами. Они обеспечивают увеличение эффективности ГВ на 4…5 % при увеличении скорости хода судна на 1…2 % и частоты вращения ГВ на 1…1,5 оборота [5].
2.2.2. Режим работы двигателя с редукторной передачей
Работа двигателя с ВФШ и редукторной передачей позволяет существенно увеличить упор и крутящий момент на гребном винте при том же заданном значении мощности двигателя. Увеличение упора гребного винта составляет приблизительно 30 %, но при этом потребуется увеличить и диаметр винта [1]. Более значительное улучшение тяговых характеристик может быть достигнуто путем использования многоскоростных редукторов
Перед вводом в действие редуктора ГД необходимо ознакомиться с руководством по эксплуатации от производителя. Перед пуском следует убедиться в том, что уровень масла в редукторе соответствует норме, то есть убедиться в том, что на панели АПС отсутствует предупредительный сигнал. Уровень масла можно проверить и масляным щупом.
В рамках подготовки к пуску производится ручная прокачка маслом системы при помощи вспомогательного масляного насоса редуктора. Потом редуктор следует провернуть вместе с ГД. Затем вспомогательный маслонасос устанавливается в автоматический режим. Он автоматически запускается системой ДАУ перед пуском главного двигателя и работает до достижения определенного давления масла (например, для редуктора REINTJTSS VA1060K41 более 1,2 бар), потом насос автоматически отключается и смазка редуктора будет осуществляться от навесного шестеренного насоса.
При остановке ГД или падении давления ниже 1,2 bar вспомогательный насос автоматически запускается и будет работать по заданной производителем выдержке времени 10 минут после полной остановки главного двигателя.
2.2.3. Режим работы ГД в многовальных и многомашинных установках с гидромуфтами
Особенности работы в системе многовальных и многомашинных установок состоят в том, что улучшается использование мощности установки при возможности отключения отдельных двигателей. В качестве соединительно-разобщительных муфт часто используются гидравлические муфты.
В гидродинамической передаче энергия от ведущего вала передается за счет скоростного напора циркулирующей жидкости. Гидродинамическая передача включает центробежный насос, приводимый двигателем, и гидротурбины, сближенные так, что их колеса образуют торообразную полость, заполняемую рабочей жидкостью. Гидротурбина связана с валом движителя. Моменты на входном и выходном валах одинаковы и равны крутящему моменту ГД, а снижение частоты обусловлено только потерями энергии в муфте.
Общий КПД гидромуфты – это отношение мощности развиваемой гидротурбиной к подведенной мощности насоса и равен отношению частот вращения роторов турбины и насоса или иначе произведению их КПД.
Муфта должна быть заполнена жидкостью (водой, маслом или специальными смесями для гидромашин). Для включения муфты следует открыть золотник подвода рабочей жидкости из напорной цистерны на всасывание насоса гидромуфты. Энергия циркулирующей жидкости используется в турбине.
Часть жидкости сливается в сточную цистерну, откуда она забирается насосом и через фильтры и маслоохладитель подается в напорную цистерну.
При обслуживании надо обеспечить чистоту фильтров, подачу забортной воды в охладитель, чистоту забортной воды (в южных широтах на входе в охладитель следует установить ловушки для ракушек).
Следует контролировать уровни рабочей жидкости в цистернах и обеспечить надежную работу насоса.
При снижении частоты вращения ведомого вала и неизменной частоте вращения ведущего вала момент на турбинном колесе может значительно возрастать, что в случае сохранения равенства моментов на ведомом и ведущем колесах приводит к перегрузке двигателя.
Таким образом, гидромуфта не предохраняет двигатель от перегрузок, но имеется устройство для ограничения нагрузки. При заклинивании гребного винта ГД следует немедленно остановить.
Гидромуфты имеют следующие основные свойства: независимость вращения ведомого и ведущего валов, плавное трогание с места и плавный разгон, ограничение крутильных колебаний, бесшумность работы, надежность в эксплуатации, высокий КПД на номинальном режиме, простота автоматизации и управления.
Гидромуфты применяют обычно в дизель-редукторных агрегатах для эластичной связи между двигателем и движителем, демпфирования крутильных колебаний в системе валопровод-двигатель, для включения и отключения движителя, для снижения частоты вращения с целью уменьшения скорости судна.
Демпфирующая способность гидромуфт особенно значима при плавании во льдах. Элементы пропульсивного комплекса испытывают меньшие динамические нагрузки при ударах винта об лед.
При эксплуатации следует обеспечить исправность автомата безопасности, наличие которого обязательно по требованиям Морского Регистра судоходства при использовании в составе гидромуфт в составе ПК.
Автомат безопасности страхует регулятор и защитит двигатель от разноса при внезапном отключении муфты [2].
Гидропередачи способны обеспечить высокие тяговые характеристики на пониженных частотах ГВ без превышения нагрузки на двигатели.
Гидропередачи по сравнению с редукторной имеют меньший К. П. Д. и большую массы и габариты. Наиболее эффективна комбинация гидродинамической и редукторной передач. На рис. 2.2. приведена типичная схема смазки редукторного агрегата и управления гидравлической муфтой.
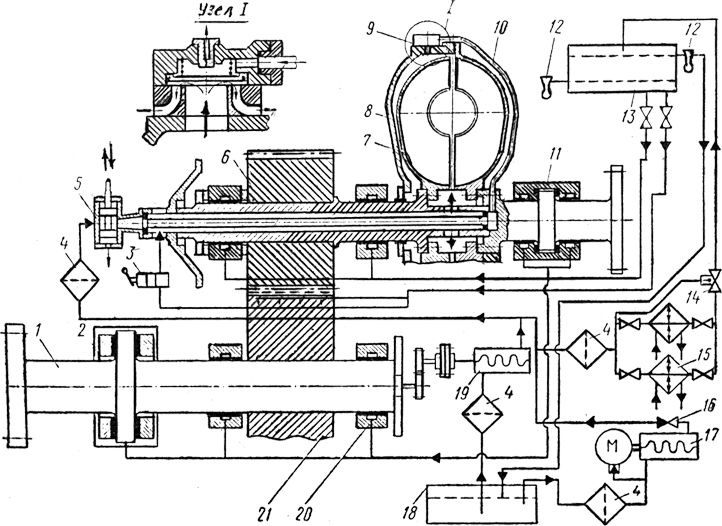
Рис. 2.2. Схема системы смазки редуктора и управления гидромуфтой:
1 – вал отбора мощности на винт; 2 – главный упорный подшипник; 3 – управляемый клапан гидромуфты; 4 – фильтры; 5 – отсечной клапан гидромуфты; 6 – шестерня; 7,8 – роторы гидромуфты; 9 – управляемый сливной клапан; 10 – трубка подачи масла; 11 – упорный подшипник; 12 – поплавковое устройство включения резервного масляного насоса; 13,18 – напорная и маслосборная цистерны; 14,16 – терморегулировочный и невозвратно-запорный клапаны; 15 – охладители масла; 17 – резервный масляный насос с электроприводом и автоматическим управлением; 19 – основной масляный насос; 20 – опорные подшипники; 21 – зубчатое колесо
При работе масло из гравитационной цистерны поступает к отсечному клапану 5 управления гидромуфтой, который управляется пневматически дистанционно с помощью управляемого клапана 3. Масло от клапана 5 идет к сливным каналам 9, которые поддерживаются в закрытом состоянии. Затем по наполнительному каналу в ведомом валу оно поступает в межлопаточные полости ротора гидромуфты, вводя ее в действие. При перемещении золотника отсечного клапана в верхнее положение масло сливается в картер освобождая клапаны. Одновременно доступ масла к гидромуфте прекращается, а имеющееся там масло сливается в картер в течение 10…15 секунд. Таким образом муфты разобщаются
Необходимо обеспечить применение качественных масел рекомендуемой вязкости. При эксплуатации температуру масла не рекомендуется повышать более 60 С, давление масла в системе надо поддерживать в рекомендуемых пределах (обычно 0,13–0,30 МПа), для чего в гравитационной цистерне предусмотрены поплавковые ограничители уровней. Необходимо своевременно очищать фильтры и отстойники, контролировать качество масла.
Характер распределения нагрузки на работающие двигатели в одновальной двухмашинной пропульсивной установке иллюстрируется рисунком 2.3 [1].
Предполагается, что вращающий момент, поглощаемый винтом, равномерно распределяется между двумя ГД, работающими на один вал. Кривые изменения крутящих моментов при различных частотах коленчатого вала двигателей n1 изображены для случаев подключения одной (линии 1) и двух (линии 2) муфт. Кривая I представляет собой винтовую характеристику, приведенную к ведомому валу гидромуфты.
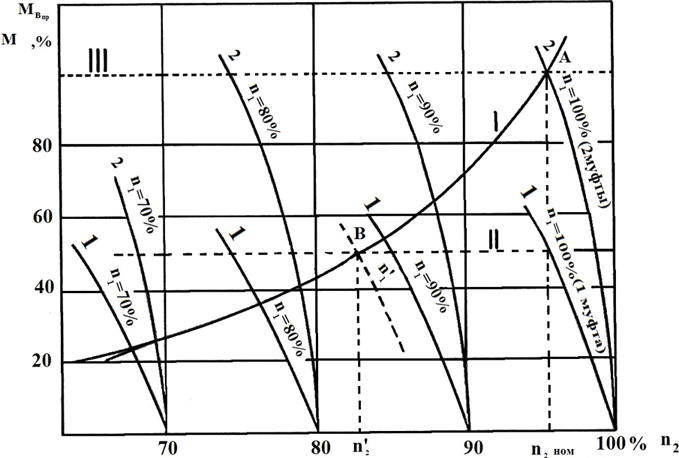
Рис. 2.3. Определение режимов совместной работы двигателей с ГВ в двухмашинной одновальной установке с гидромуфтами [1].
Линии I и II являются характеристиками по максимальному крутящему моменту при работе соответственно двух и одного ГД. По точкам пересечения кривых определяют частоту вращения ведомого вала гидромуфты и гребного винта по известной частоте вращения двигателя n1.
При работе двух двигателей на номинальном режиме рабочая точка режима, находится в точке А. Частота вращения ведомого вала гидромуфты равна n2ном Если работает один двигатель, то максимально допустимый момент будет достигаться в точке В, при частоте вращения ГД n1 и частоте вращения ведомого вала n2.
Частота вращения ведомого вала гидромуфты равна
n2 = n1 ∙ ηгм,
где n1 – частота вращения двигателя и ведущего вала;
ηгм – КПД гидромуфты.
Частота вращения гребного вала,
nв = n2 ∙ i,
где i – коэффициент редукции частоты вращения.
Имея совмещенный график, изображенный на рисунке 2.4 можно вычислить при какой частоте вращения гребного вала необходимо включать в работу два двигателя, а также оценить скорость судна при работе одного двигателя.
Управление двигателями в многовальных установках имеет свои особенности. Современные ГД, как правило, комплектуются регуляторами частоты вращения реализующими защиту по перегрузке и давлению наддува. Степень неравномерности для ГД, работающих в одновальных установках выставляется в пределах 1,5…3,0 %. В двухвальных установках она не может быть меньше 3 %, так как возможно возникновение обменных колебаний.
Повысить надежность и безопасность эксплуатации энергетических установок с двумя гребными винтами можно, если предусмотреть в системе управления обеспечение фазовой синхронизации гребных валов, которая приводит к значительному снижению вибрации на многовальных судах [5].
2.2.4. Режим работы ГД в установках с электрической передачей
Режим работы дизеля определяется при совместном рассмотрении винтовых характеристик потребителя, характеристик тягового электродвигателя и внешней характеристики дизеля.
На рис. 2.4 приведены характеристики пропульсивного комплекса буксира-спасателя. Кривые 1, 2, 3, 4 показывают механические характеристики тягового электродвигателя при различных частотах вращения дизеля. За ограничительный параметр принимают постоянство мощности электродвигателя. Если кривая изменения крутящего момента электродвигателя при постоянной его мощности (кривая III) проходит ниже механической характеристики, то на таких режимах возможна перегрузка ГД.
Гребные электрические установки постоянного тока применяют на судах с тяжелыми режимами работы (частое реверсирование, резкое изменение момента сопротивления ГВ вплоть до заклинивания, необходимость создания значительного момента на малых оборотах винта).
Реверсирование ГВ на полном ходу происходит очень быстро и имеется возможность работы на самом малом числе оборотов (4…5 % от номинального числа оборотов).
В настоящее время активно используются вынесенные электрические винторулевые комплексы типа Azipod. Принципиально эта новая система не отличается от традиционной передачи на винт. Управляемость и маневренность судов значительно улучшилась за счет повышения эффективности работы винта, который вынесен за пределы возмущенного корпусом судна потока воды.
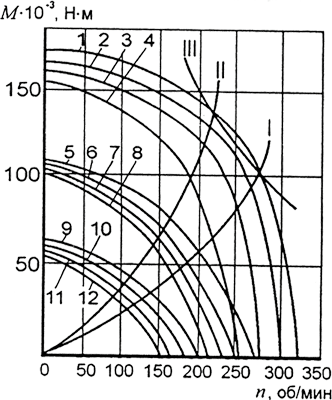
Рис. 2.4. Характеристики ПК буксира-спасателя на номинальном и частичных режимах работы [1]:
I, II – винтовые характеристики судна на свободном ходу и на швартовых;
III – характеристика при постоянной мощности электродвигателя. 1…12 – тяговые характеристики при различных частотах вращения ГД (1…4), при различных токах возбуждения (5…8), при комбинированном способе управления (9…12)
Система обеспечивает полный упор винта в любом направлении, освобождая судно от традиционной массивной линии вала и рулевого устройства.
Типовая схема главного ВРК Azipod с электродвигателем, размещенным в гондоле, и непосредственно вращающем ГВ представлена на рисунке 2.6 [27].
Конструктивно гребной электродвигатель колонки «Азипод» встроен в стальной корпус подводной части колонки. Гребной электродвигатель имеет воздушное охлаждение, причем воздух подается из румпельного помещения (при необходимости через холодильники). Передача крутящего момента от электродвигателя к гребному винту производится через гребной вал, установленный на опорно-упорных подшипниках качения и имеющий уплотнения. Электроэнергия на привод гребного электродвигателя подается от судовой системы электропитания.
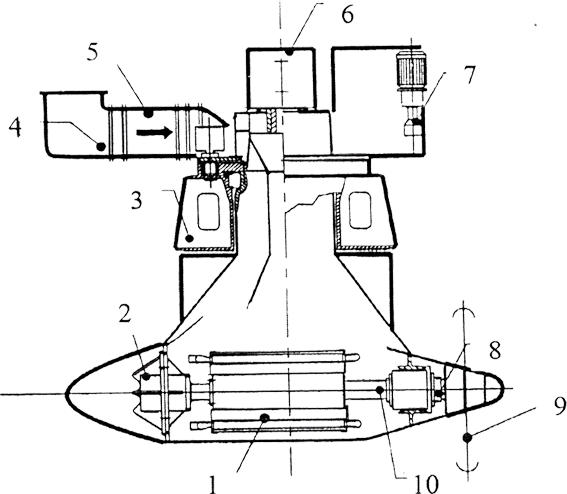
Рис. 2.5. Типовая схема ВРК с электродвигателем в гондоле [3]:
1 – электродвигатель; 2 – упорный подшипник; 3 – установочный блок; 4 – вентиляционная установка; 5 – воздухоохладитель; 6 – токосъемник; 7 – гидравлическая система поворота колонки; 8 – подшипник и уплотнения ГВ; 9 – винт фиксированного шага;
10 – гребной вал
Используются эластичные кабели, с ограничением угла разворота «Азипода», либо кольца скольжения (в этом случае колонка может вращаться вокруг вертикальной оси свободно без ограничений). Рулевая система «Азипода» гидравлическая.
В гондоле колонки располагается электродвигатель переменного тока, частота вращения которого регулируется частотным преобразователем.
Движительные комплексы «Азипод» могут выполняться в различных компоновках: в тянущем варианте, когда винт расположен впереди гондолы и толкающем – с расположением винта за гондолой, а также двухвинтовом варианте с винтами впереди и сзади гондолы при расположении винтов в насадке или без нее.
Важным положительным качеством ГВРК является хорошая управляемость судна на заднем ходу, благодаря большой поперечной силе, условиям обтекания корпуса, когда струя винта не натекает на него. Для обеспечения заднего хода ГВРК разворачивается на 180°, при этом гребной винт не реверсируется.
Рулевое устройство включает два или три гидравлических двигателя. Система контроля «Азипода» включает контроль всех электрических цепей на мостике вместе с главными электрическими панелями.
В отличие от ВРК с механическим приводом требуется обслуживание системы воздушного охлаждения. Воздух подается в рулевую колонку из румпельного помещения и может при необходимости предварительно охлаждаться в охладителях водой.
В качестве приводных двигателей применяются высокооборотные или среднеоборотные дизели, приспособленные для работы на средневязких топливах.