
Александр Вячеславович Фролов
Робототехника: практическое введение для детей и взрослых
Содержание книги
Эта книга поможет вам быстро освоить основы робототехники и приступить к конструированию собственных роботов, систем автоматизации и даже элементов умного дома.
Если вы не программист, то наша книга позволит вам реализовать свои идеи в области робототехники с помощью визуальных средств разработки, не требующих программирования. Вам не потребуется паяльник – современные компоненты можно устанавливать на макетных платах, не вдыхая запах канифоли.
Изучайте микроконтроллеры и робототехнику по нашей книге, и вы сможете быстро освоить современные профессии.
Вы научитесь программировать micro:bit версий 1.5 и 2, научитесь работать с кнопками, светодиодами, светодиодным и OLED-экраном, измерять температуру, ускорение, напряженность магнитного поля.
Используя интерфейс GPIO, предусмотренный на плате micro:bit, вы подключите такие устройства, как моторы, сервоприводы, обычные и сенсорные кнопки, датчики движения, расстояния и многие другие.
Данные, полученные от контроллеров, вы сможете передавать на другие контроллеры с помощью радиоканала Bluetooth, а также контроллеров LoRa, способных обеспечить радиосвязь на расстояния, исчисляемые километрами.
В отдельной главе мы расскажем о том, как организовать электропитание робота или других конструкций с микроконтроллерами.
В главе 1 «Запускаем микроконтроллер micro:bit» вы научитесь создавать простые программы для micro:bit версий 1.5 и 2 с помощью визуального редактора блоков Microsoft MakeCode for micro:bit.
Эти программы вы будете загружать в микроконтроллер через браузер, через сайт https://makecode.microbit.org/, через автономную программу Microsoft MakeCode, установленную на компьютере или ноутбуке, а также через приложение micro:bit, установленное в смартфоне или планшете.
Глава 2 «Управляем светодиодами» расскажем вам о том, как можно легко выводить на экран micro:bit, состоящий из 25 светодиодов, различную графическую, числовую и текстовую информацию.
Также с помощью генератора случайных чисел вы создадите на этом экране простую анимацию – звездное небо и блуждающую точку.
В главе 3 «Работаем с кнопками» мы будем использовать кнопки A и B, расположенные на плате micro:bit, а также сенсорную кнопку в виде логотипа, доступную в micro:bit версии 2. Вы научитесь обрабатывать события, возникающие при нажатии этих кнопок, а также проверять их состояние во время работы программы. Кроме этого, вы сможете использовать контакты P0, P1 и P2 в качестве сенсорных кнопок.
Эти знания помогут вам управлять с помощью обычных и сенсорных кнопок работой программы звездного неба, созданной во второй главе, и другими различными программами.
В главе 4 «Измеряем температуру» вы научитесь пользоваться измерителем температуры, встроенным в процессор платы micro:bit. Это позволит вам создать программы, которые показывают текущую температуру процессора, а также контролировать превышение температуры сверх заданного значения.
Глава 5 «Измеряем ускорение» позволит вам контролировать движение платы micro:bit с ускорением или нахождение ее в состоянии невесомости. Вы научитесь обрабатывать жесты – поворот платы микроконтроллера логотипом вверх или вниз, наклон вправо или влево, поворот монитором вверх или вниз, встряхивание.
Все это будет возможно, когда вы научитесь работать с акселерометром, специально предназначенным для измерения ускорения во всех трех направлениях движения. Это устройство встроено в плату micro:bit.
Вы создадите программы, способные обнаружить невесомость и значительные перегрузки, реагировать на жесты, строить гистограмму значений ускорения.
Глава 6 называется «Встроенный магнитометр». В ней вы научитесь использовать магнитометр, расположенный на плате micro:bit, для исследования напряженности магнитного поля, а также сделаете простейший компас.
В главе 7 «Подключаем внешние устройства» мы научим вас работать с некоторыми внешними устройствами из набора DFRobot для micro:bit. Набор хорош тем, что не требует никаких навыков пайки и позволяет легко изучить способы подключения и программирования таких устройств, как светодиод, кнопки, моторы, потенциометры, датчики движения.
Вы сможете управлять яркостью небольшой светодиодной ленты и даже превратите свой micro:bit в простую музыкальную шкатулку.
Глава 8 «Осваиваем GPIO» посвящена подключению различных периферийных устройств к разъему GPIO микрокомпьютера micro:bit. Мы расскажем об этом разъеме и назначении его контактов, научим вас подключать к нему потенциометры, светодиоды, мощные лампочки. МЫ также расскажем об использовании широтно-импульсной модуляции для управления яркостью светодиодов и лампочек, а также скоростью вращения моторов.
Вы подключите ультразвуковой и инфракрасный дальномеры, которые пригодятся при создании роботов, например, для исключения столкновений с препятствиями при движении.
Мы также расскажем об использовании макетных плат для сборки различных схем без помощи пайки.
Глава 9 «Запускаем радиоканал» будет полезна, если в вашем проекте используется несколько плат micro:bit. Для создания радиоканала между платами вы будете использовать контроллеры Bluetooth. Такое контроллер уже встроен в плату micro:bit.
Работая с этой главой, вы сделаете устройство с пультом управления, позволяющее включать и выключать дистанционно лампочку и вентилятор, а также научитесь передавать по радио данные телеметрии. Мы также расскажем, как управлять мощностью передаваемого сигнала, и как измерять мощность принятого сигнала.
Глава 10 «Подключаем micro:bit к компьютеру и второму micro:bit» научит вас передавать данные из micro:bit в терминальную программу, работающую на компьютере, подключенном к плате micro:bit через порт USB. Такая возможность будет очень удобна при отладке программ, работающих на micro:bit.
Также вы научитесь передавать данные между двумя платами micro:bit, соединенными двумя проводами с помощью интерфейса UART.
В главе 11 «Марсоход BoxRover заводит моторы» вы приблизитесь к созданию ровера – модели радиоуправляемого марсохода. Вы научитесь управлять моторами ровера с помощью транзистора и контроллера MX1508, реализующих функции H-моста и создадите программу, управляющую вращением двигателя.
Работая над этой главой, вы создадите первый прототип ровера BoxRover с микроконтроллером micro:bit, управляемого по радио со второго такого же контроллера.
В качестве домашнего задания вы сделаете простейшую систему передачи данных телеметрии, способную передавать в пульт управления температуру процессора micro:bit ровера. При этом на экране ровера будет отображаться температура процессора micro:bit пульта управления.
Глава 12 «Управляем сервоприводами» также посвящена управлению двигателями, только другого типа. В этой главе мы расскажем о сервоприводах, которые могут поворачивать свою ось на заданный угол, а также о сервоприводах непрерывного вращения, способных поддерживать скорость и направление вращения вала.
В этой главе вы узнаете, как устроены сервоприводы, а также научитесь создавать программы для micro:bit, способные ими управлять.
Вы создадите программу для ручного управление сервоприводом при помощи потенциометра, а в качестве домашнего задания – систему автоматического управления шлагбаумом. Она будет открывать шлагбаум, когда к нему приближается автомобиль, а после проезда автомобиля —автоматически закрывать шлагбаум.
В главе 13 «Осваиваем I2C» мы расскажем об интерфейсе I2C, специально предназначенном для подключения периферийных устройств к микроконтроллерам. На плате micro:bit уже есть все необходимое для работы с I2C.
Вы научитесь подключать к этому интерфейсу измеритель освещенности BH1750 FVI GY-30, погодную станцию Grove-BME280 или Grove-BMP280, а также OLED монитор, и, конечно, напишете программы для работы с ними.
На базе контроллера часов реального времени DS-3231 вы соберете часы с таймером и погодной станцией, позволяющие устанавливать текущую дату, текущее время, время срабатывания таймера. Когда таймер установлен, горит светодиод желтого цвета, а когда он сработал – белого. С помощью кнопок A и B, расположенных на плате micro:bit, вы сможете установить текущие дату и время, время срабатывания таймера, сбрасывать и устанавливать таймер.
Погодная станция будет показывать на экране монитора OLED температуру, давление, влажность и температуру точки росы.
Глава 14 «Обновление BoxRover» приблизит нас еще на один шаг к созданию управляемого ровера.
Теперь наш прототип марсохода, управляемый по радио с помощью жестов, научится останавливаться перед препятствием при движении вперед и сигнализировать о такой остановке на экране монитора micro:bit, а также поднятием красного флажка с помощью сервопривода.
,Кроме всего этого, наш ровер будет отправлять в пульт управления телеметрические данные – температуру процессора и окружающей среды, давление, влажность, освещенность и температуру точки росы. Эти данные мы будем выводить на OLED-монитор, смонтированный в пульте управления.
В главе 15 «Электропитание робота» рассказано о том, какие существуют батарейки и аккумуляторы, как выбрать нужный тип питающих элементов для вашего робота. Будут рассмотрены особенности работы и зарядки аккумуляторов разных типов, применения контроллеров заряда и разряда Battery Management System (BMS).
Также вы узнаете, как использовать преобразователи и стабилизаторы для устройств, которым нужно разное напряжение питания, как подключать аккумуляторы и батарейки к макетной плате и устройствам робота с помощью отсеков и переходников, как питать робота от электрической сети 220 В на этапе отладки.
В главе 16 «Дальняя радиосвязь» рассмотрено использование технологии LoRa для создания каналов радиосвязи, способных передавать данные на большие расстояния, порядка километров и даже больше. При этом используются недорогие платы micro:bit и модули LoRa производства компании EBYTE.
Вы соберете погодную станцию, способную передавать информацию о температуре, давлении, влажности и температуре точки росы через канал дальней радиосвязи.
Вы также сделаете ретранслятор данных от сервера погодной станции, удваивающий максимальное расстояние передачи данных.
Глава 17 «Умный дом своими руками» содержит краткое введение в технологии умного дома. Мы расскажем о том, как использовать micro:bit и Raspberry Pi для сбора различных данных (о погоде, например) на обширной территории. Это может быть загородная резиденция или даже территория фабрики.
Почти в каждой главе предусмотрены домашние задания. Работая над ними самостоятельно, вы не только сможете проверить и закрепить свои знания. Решения домашних заданий вы сможете найти на сайте автора этой книги.
Исходные коды программ
Исходные коды всех программ, опубликованных в книге, вы можете скачать на сайте автора http://frolov-lib.ru/books/boxrover/, а также на GitHub https://github.com/AlexandreFrolov/BoxRover.
Свои пожелания, замечания и предложения вы можете оставить в группе по адресу https://www.facebook.com/groups/539933346894981/, а также отправить по электронной почте на адрес microbit@frolov.pp.ru.
Введение
Каждый день вы используете различную технику, даже не задумываясь о том, что в ней есть встроенные микрокомпьютеры. Вещи, которыми мы пользуемся в обиходе, становятся все более интеллектуальными.
Робот-пылесос в процессе уборки сам обследует квартиру, составляя ее карту, сам возвращается на пункт подзарядки, и сообщает о своих действиях голосом. Роботы моют окна, работают на выставках и барах, управляют автомобилями, используются в боевых действиях и в борьбе с терроризмом.
Новостные сайты в интернете забиты статьями о том, что скоро роботы начнут отнимать работу у людей, вытесняя их из ряда профессий, в том числе не требующих высокой квалификации. С этим можно спорить, однако несомненно, что робототехника уже прочно вошла в нашу жизнь, и специалисты в этой области будут всегда востребованы.
Но с чего лучше всего начинать обучение программированию и робототехнике?
Можно условно выделить два подхода к обучению.
Первый подход предполагает изучение основ электроники, компьютерной техники, программирования на ассемблере и Си, с последующим переходом к более высокоуровневым средствам проектирования программ и схемотехническим решениям на базе современных процессоров и микроконтроллеров, обучения основам численных методов и дискретной математики.
Когда-то давным-давно был доступен только первый способ, и я сам обучался именно так. Я собирал приемники-передатчики на транзисторах и лампах, различные радио устройства, триггеры из транзисторов, регистры из элементов 2И-НЕ на базе К155ЛА3, электронные часы, частотомер и самодельные компьютеры на микросхеме КР580ВМ80А, добавляя россыпь логических микросхем, микросхем памяти и периферийных устройств (рис. В.1). Первые программы были написаны, конечно же, в машинных кодах!
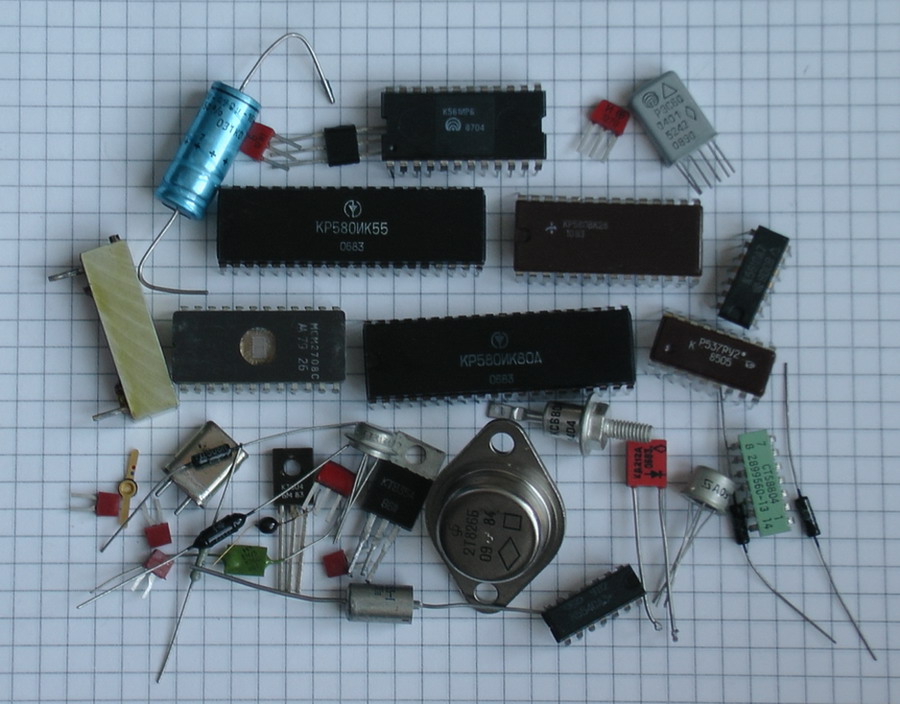
Рис. В.1. Элементная база прошлого века
У этого подхода есть очевидные преимущества и не менее очевидные недостатки.
Из важных преимуществ – на любом этапе будет понятна суть происходящего на самом низком уровне, на уровне сигналов и команд процессора, на уровне элементов и микросхем. Понимание сложных вещей будет достигаться постепенно, по мере продвижения от простого к сложному.
В то же время огромный недостаток метода обучения с самых основ заключается в том, что весь процесс отнимет очень много времени и сил. Двигаясь с самого начала, вы не скоро сможете создать что-нибудь достаточно сложное и интересное. В то же время хочется как можно быстрее насладиться результатами своего труда.
Второй подход предполагает, что обучение начинается с использования готовых наборов, содержащих микроконтроллеры и периферийные блоки, с применением графических инструментов программирования и языков высокого уровня. Далее после достижения определенных результатов, можно перейти к изучению низкоуровневых средств и инструментов. Именно этот подход мы и будем использовать в данной книге.
Проект модели марсохода BoxRover
На мой взгляд, в процессе обучения нужно двигаться к какой-нибудь интересной, но сложной цели, при этом шаги должны быть достаточно крупными, чтобы продвижение было заметно. Сложность цели необходима для получения самых разносторонних знаний, которые пригодятся в дальнейшем на работе в области ИТ и робототехники.
Здесь интересно было бы создать так называемый STEM-проект, реализация которого позволить получить знания, необходимые в реальной жизни. Аббревиатура STEM – это сокращение от Science, Technology, Engineering и Math, т.е. наука, технология, инженерное дело и математика.
Я предлагаю в качестве такого учебного проекта создать несложную модель марсохода (или движущегося робота для изучения каких-либо других планет) с названием BoxRover. Пусть ваше устройство никогда не полетит в космос, но оно сможет управляться по радио или через интернет, измерять различные параметры окружающей среды, получать фотографии и видео, и передавать все это «на землю», например, в ваш компьютер или планшет.
По мере создания модели марсохода BoxRover вы научитесь программировать встроенные микроконтроллеры, управлять движением, получать данные бортовых измерительных устройств и получите другие необходимые знания.
На рис. В.2 мы показали пример современных компонентов, из которых вы будете делать своего первого робота.
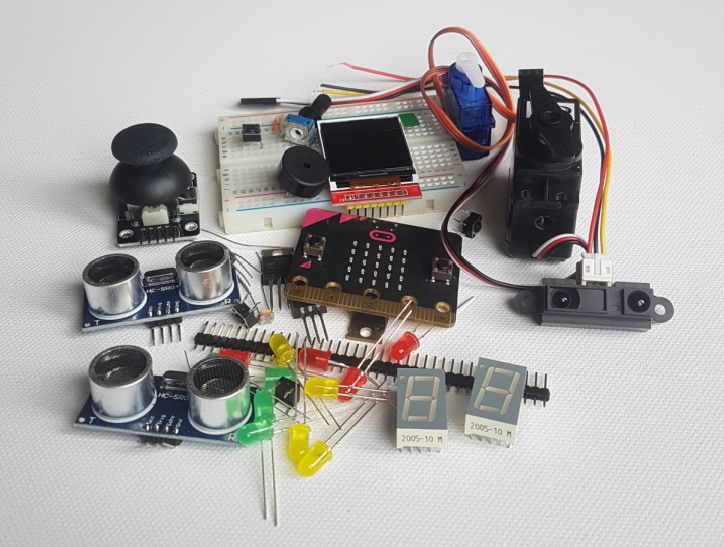
Рис. В.2. Некоторые современные компоненты для изготовления робота
На следующем этапе вы сделаете и другие проекты, например, элементы автоматизации умного дома.
Выбор платформы для обучения
На различных курсах робототехники для детей используются наборы Lego. С их помощью можно быстро собрать робота из готовых деталей и так же быстро запрограммировать на выполнение различных несложных действий. На мой взгляд, такие наборы, хотя и дают представление о некоторых функциях роботов, все же недостаточно хорошо демонстрируют взаимодействие микрокомпьютеров и периферийных устройств.
Чтобы лучше понимать, что происходит, научиться не только программировать готового робота, но и создавать собственные проекты из электронных блоков и компонентов, на разных стадиях обучения мы будем работать с микроконтроллерами BBC micro:bit, платформой Arduino, STM32 Nucleo, а также Raspberry Pi.
Микроконтроллер BBC micro:bit
Микроконтроллер BBC micro:bit был создан корпорацией BBC как открытый проект, нацеленный на повышение компьютерной грамотности, и в первой версии стал доступен в феврале 2016 года. Сейчас в продаже появилась значительно улучшенная версия 2 этого микроконтроллера.
В России micro:bit версии 1.5 можно купить в нескольких интернет-магазинах по цене ниже 1900 руб., что делает его весьма доступным решением для начала обучения. На момент написания книги версию 2 можно было приобрести в магазине https://mrobot.by (примерно по такой же цене), а также в зарубежных магазинах. На странице https://microbit.org/buy/ представлен список компаний из разных стран, где можно купить micro:bit версии 2.
Даже первая версия этого недорогого микрокомпьютера размером с половину кредитной карты оснащена неплохим набором периферийных устройств. В micro:bit версии 2 был добавлен микрофон, динамик, еще одна сенсорная кнопка, увеличен объем памяти и мощность процессора. Кроме того, появился режим сохранения энергии, что важно при питании от батарей и аккумуляторов.
В табл. 1 вы найдете сравнение характеристик micro:bit версии 1.5 и 2 с другими широко распространенными микроконтроллерами – Arduino UNO и STM32 Nucleo F401RE.
Табл. В1. Сравнение характеристик микроконтроллеров

Если вы создаете проект робота или какой-либо другой проект с микроконтроллером, то при использовании micro:bit v2 можете воспользоваться многими устройствами, установленными на плате этого микроконтроллера:
Заметим, что в micro:bit v2, в отличие от v1.5, шина I2C полностью выделена для внешних устройств. К ней не подключены устройства, расположенные на плате micro:bit.
Также добавился четвертый свободный для использования контакт интерфейса GPIO. Была увеличена допустимая токовая нагрузка на подключаемую периферию. Если раньше в micro:bit v1.5 суммарный ток на контактах GPIO не должен был превышать 90 мА, то в версии 2 этот предел расширен до 190 мА.
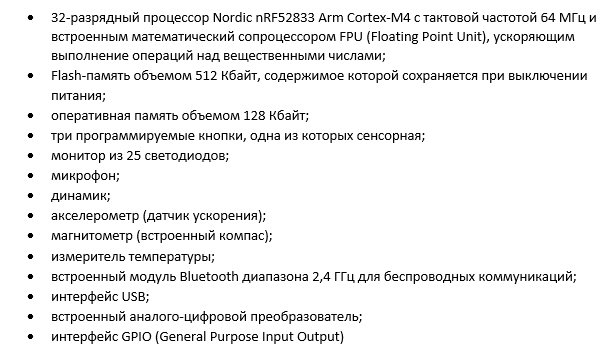
Как видите, в микроконтроллере micro:bit уже имеется встроенное оборудование, которое потребуется нам для модели марсохода (рис. В.3, В.4). Устройства, которые появились на плате micro:bit v2 показаны на рис. В.5 и В.6.
Даже с базовым оборудованием micro:bit версии 2 наш марсоход сможет измерять температуру, напряженность магнитного поля, реагировать на ускорения, подавать звуковые сигналы, обнаруживать источники звука, и даже показывать инопланетным зрителям картинки на мониторе!
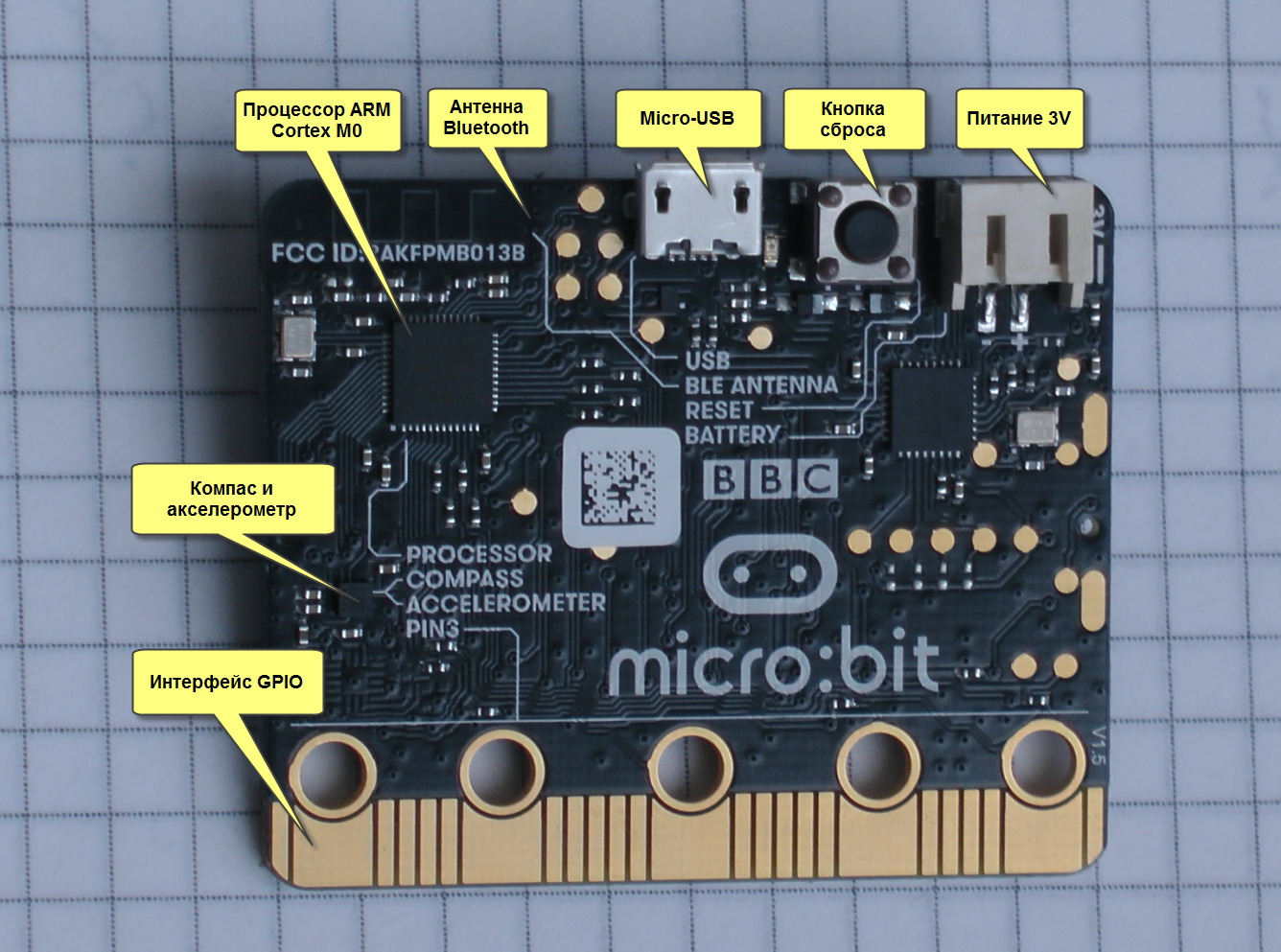
Рис. В.3. Оборудование на плате micro:bit v1.5
По мере реализации проекта BoxRover мы подключим к micro:bit и другие устройства, например, контроллеры, предназначенные для управления двигателями платформы, погодную станцию, OLED-монитор.
Особенно следует отметить наличие у micro:bit интерфейса GPIO. Используя порты GPIO, вы сможете подключать к микроконтроллеру различные цифровые и аналоговые устройства.
Два контакта порта GPIO используются для подключения внешних устройств, работающих с протоколом I2C (Inter-Integrated Circuit). Также предусмотрено три контакта для обмена данными с устройствами по протоколу SPI (Serial Parallel Interface).
Наличие портов I2C (встречается обозначение I2C) и SPI дает возможность подключить к микроконтроллеру такие устройства, как моторы и шаговые двигатели, датчики движения, датчики газа и наличия воды, радио модули и т.д. Эти устройства продаются в интернет-магазинах и, как вы увидите, легко подключаются к micro:bit и программируются.
Микрокомпьютер micro:bit при питании от батарей потребляет всего несколько десятков мА при напряжении питания 3В. И это если включены все светодиоды, а процессор загружен на полную мощность. Заметим, что макет нашего марсохода будет питаться от батарей или аккумуляторов, поэтому важно, чтобы все бортовые устройства потребляли как можно меньше энергии.
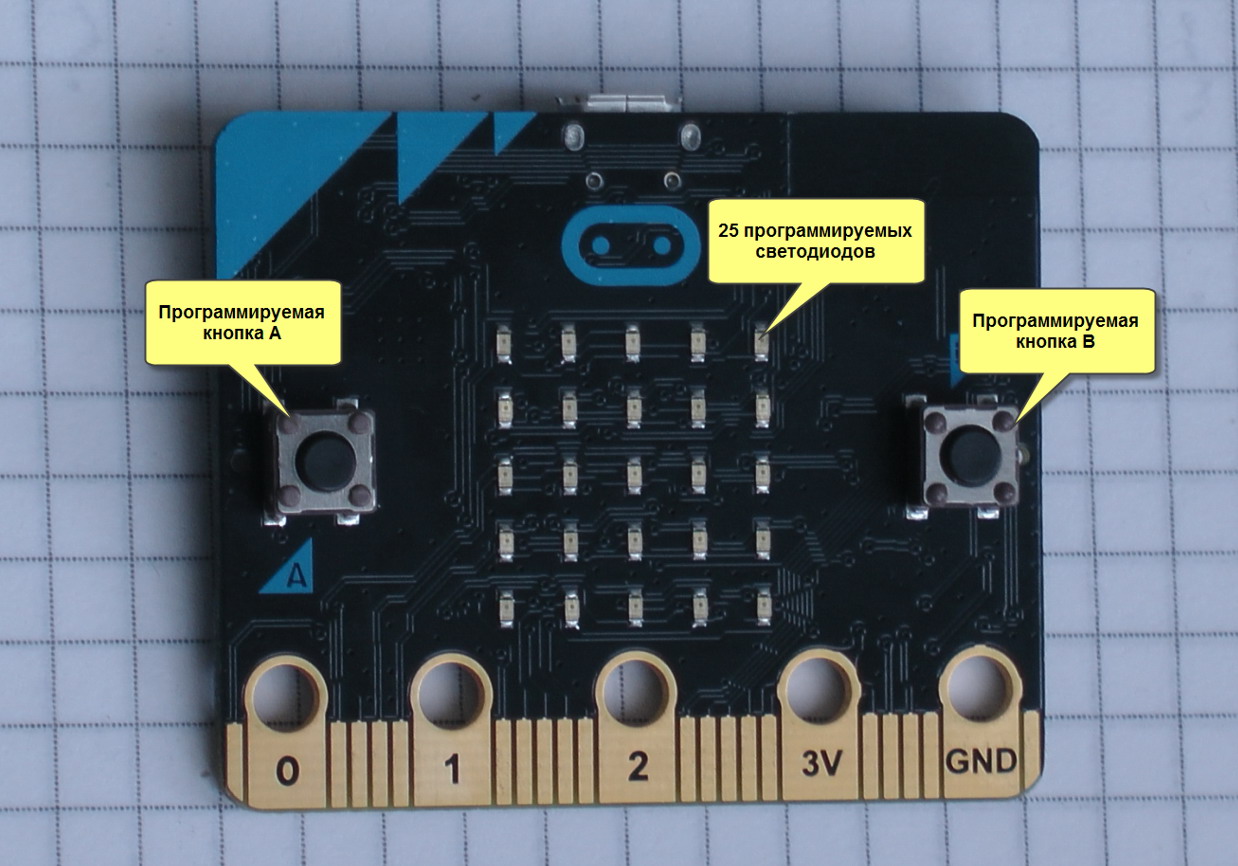
Рис. В.4. Кнопки и светодиодный экран на плате micro:bit v1.5
Начинающие программисты смогут воспользоваться визуальным редактором программ MakeCode. Этот редактор доступен через браузер, так что его даже не надо устанавливать на компьютер (хотя есть и версия для установки на Windows и MacOS). Также можно работать с MakeCode при помощи мобильного приложения, доступного для смартфонов и планшетов на базе Android и iOS.
Рис. В.5. Сенсорная кнопка в виде логотипа, микрофон и светодиод на плате micro:bit v2
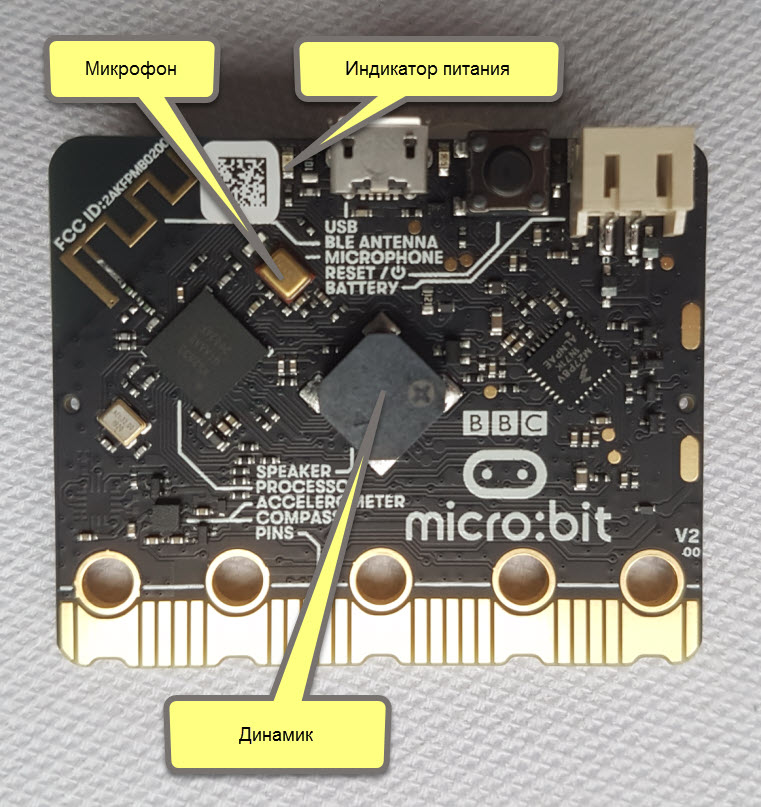
Рис. В.6. Микрофон, индикатор питания и динамик на плате micro:bit v2
Для micro:bit можно создавать программы на языке Python, используя несложный в использовании редактор Python Editor. Есть также инструменты, позволяющие программировать micro:bit на языках JavaScript, С и даже Ada.